Learning Advanced Features
Aux Motor becomes Main Motor. Operating motors can be controlled together by PID. It is possible
to check the priority in [AP1-45/46 Aux Priority].
A condition that Aux Motor is turned off.
If the real operating frequency of Main Motor is lower than the frequency set in Stop Freq, AP1-
44(Aux Motor Run) decreases(-1) after the time set in AP1-54(Aux Stop DT) and the present Main
Motor becomes Aux Motor, decelerating based on time of [DRV-04 Dec Time] until 0Hz.
At the same time, the rest of operating motors last PID control. It is possible to check the priority in
[AP1-45/46 Aux Priority].
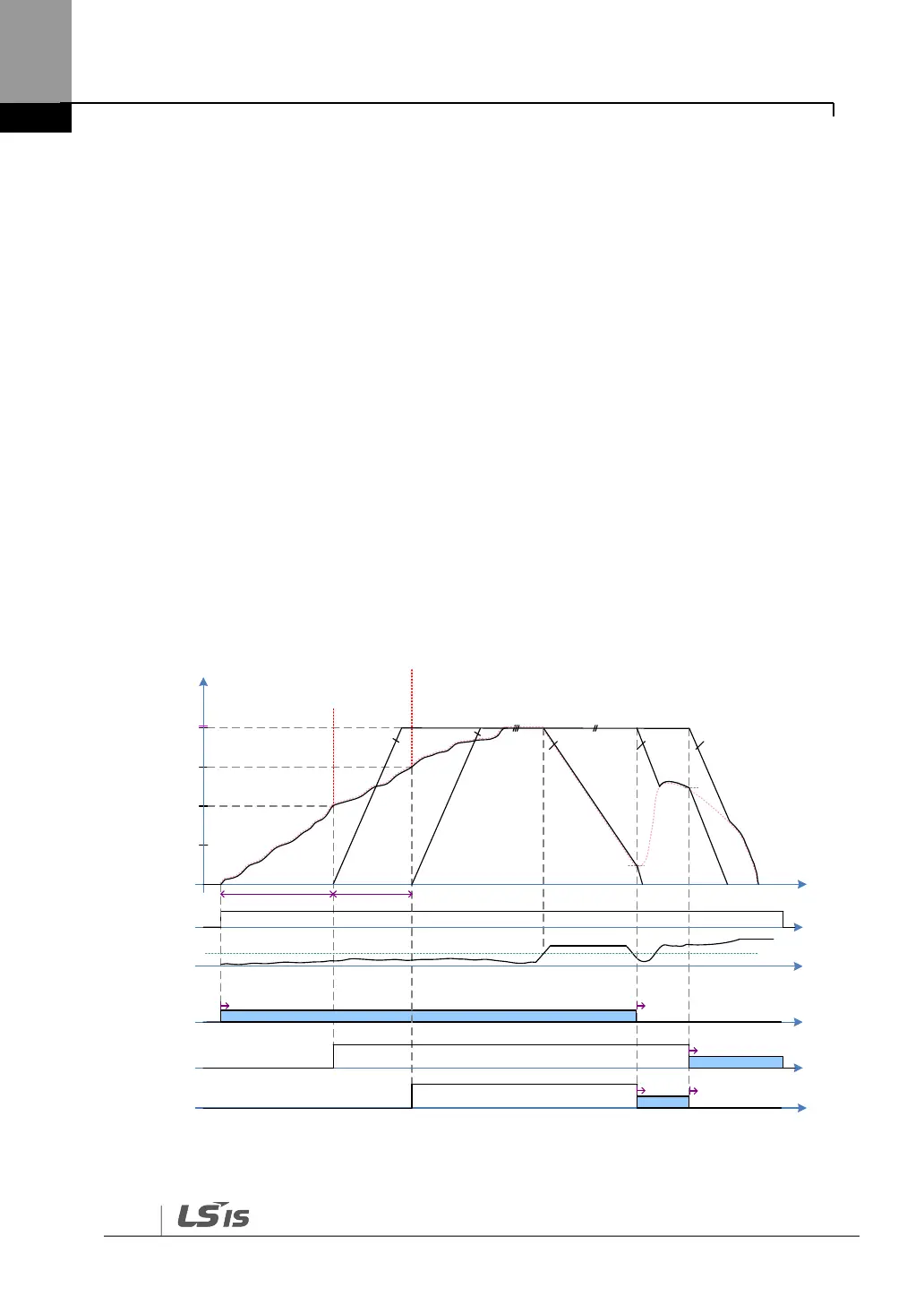
5.44.8.3 Re-arrangement of priority based on operating time.
The priority of each Motor is arranged automatically based on operating time.
Among operating Motors, Motor with the longest operating time is placed at the last.
The moment for the priority arrangement is the time when the number of motor is changed.
Start Freq 1
Start Freq 3
Out Freq
Run Cmd
Follower Freq
M1 OutFreq
M2 OutFreq
FeedBack
PID Reference
Start Freq 2
M3 OutFreq
M2, M3, M1
M1 Cmd Freq
PID Ctrl
M2 Cmd Freq
M3 Cmd Freq
Main Motor
Aux Motor
PID Output
PID Limit High
Priority at the moment
M2 M1 M3
Initial Priority
M1 M2 M3
Priority at the moment
M2 M3 M1
More than 1min Less than 1min
t
M3
M2
Stop Freq 3
Stop Freq 1
Follower Freq
Follower Freq
PID Ctrl
Main Motor
Aux Motor
Aux Motor
Aux Motor
PID Ctrl
Main Motor
M1
M2
M3
M2, M3
The picture below shows the operating time of M1 is the longest during Multi Follower Mode.