Chapter 15 PID Function (Built-in function)
15 - 9
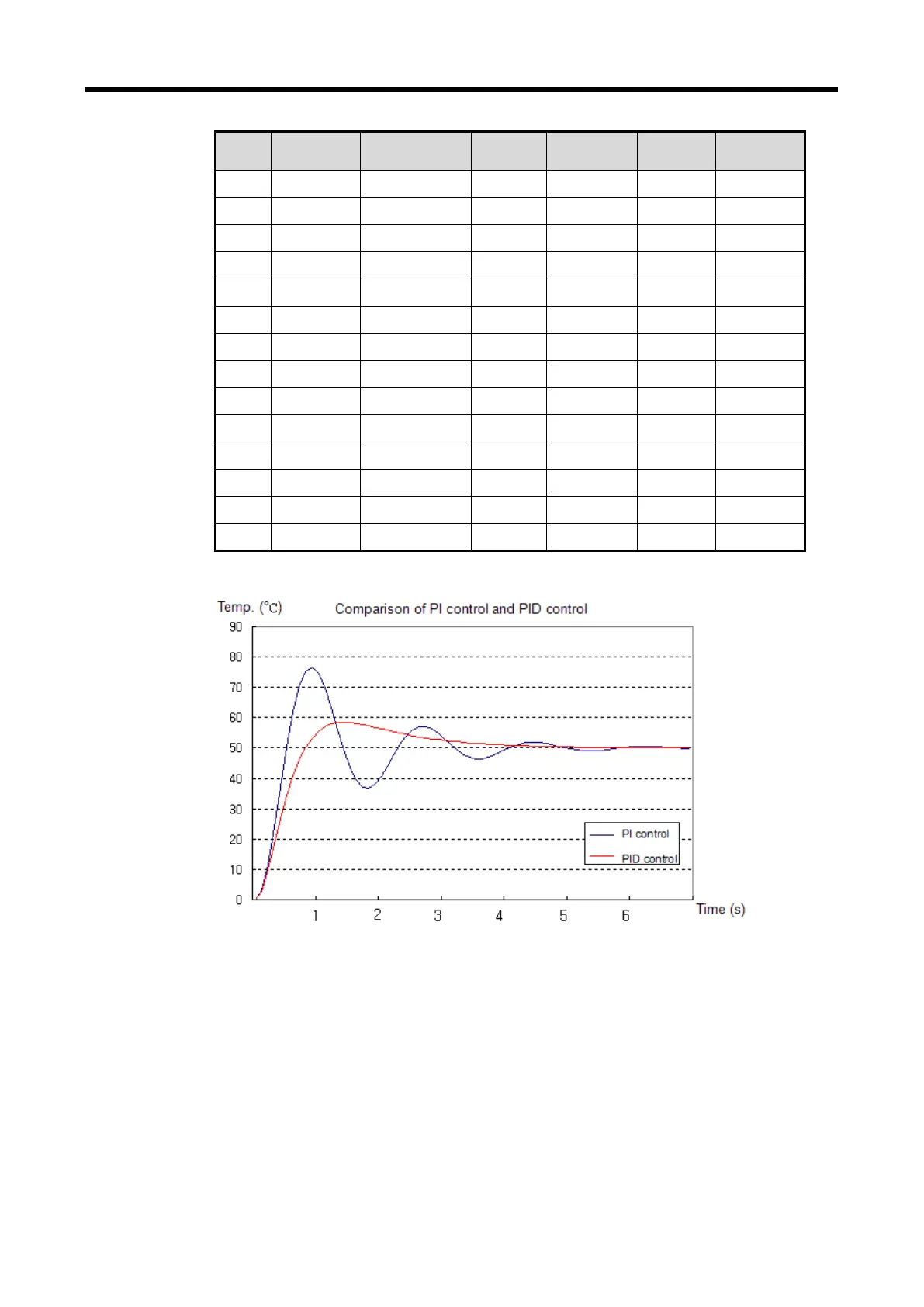
< Table 15.5 comparison of PI control and PID control >
< Figure 15.6 comparison of PI control and PID control >
(d) Considering table 15.5, in case PID control is used, max. overshoot decreases from 16.5℃ to
8.5℃. At this time, P coefficient, integral time, derivative time are not optimal values, just one of
the examples. Actually, P coefficient, integral time, derivative time values vary according to PID
control system.
 Loading...
Loading...