XGB Analog edition manual
15 - 8
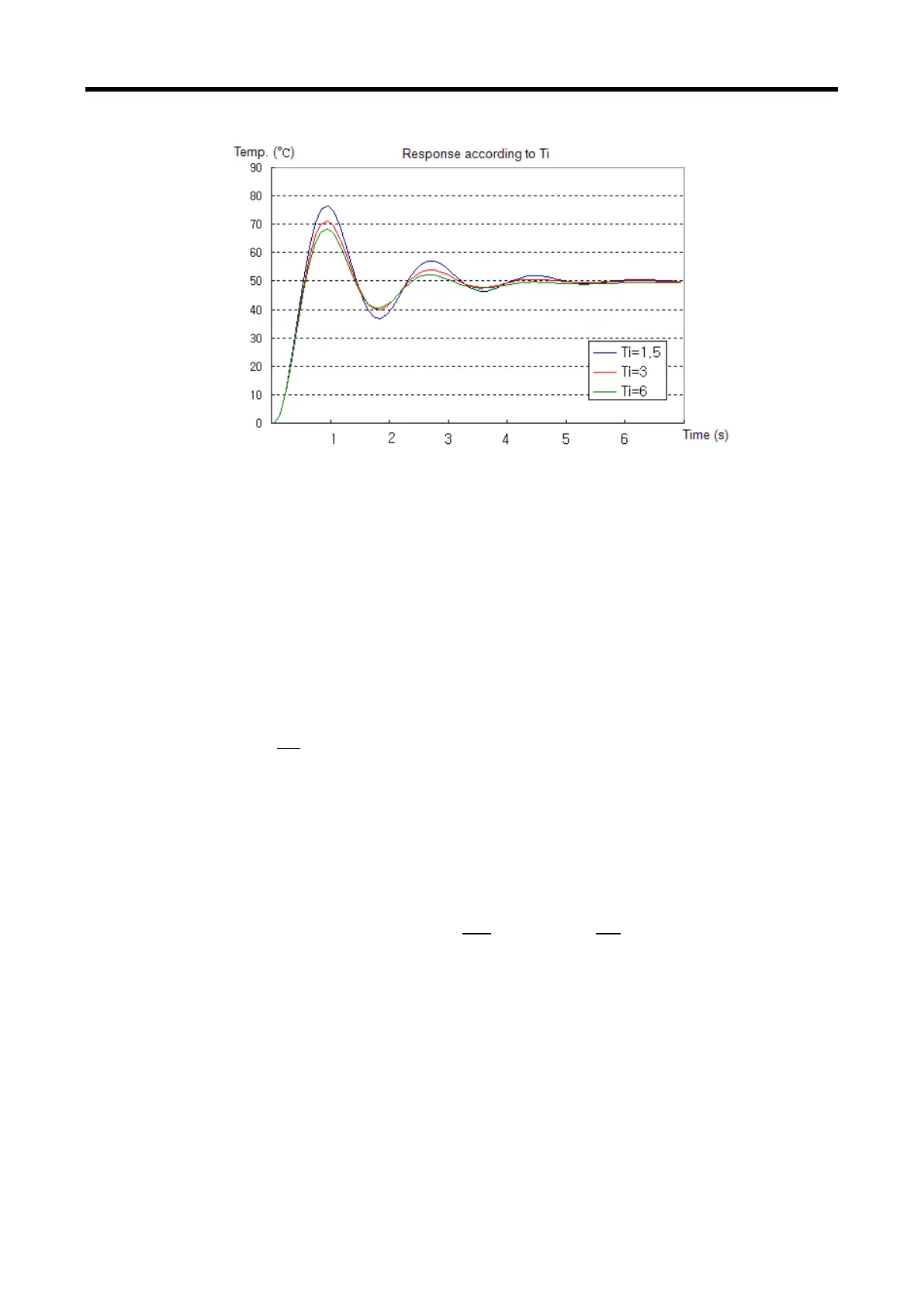
< Figure 15.5 overshoot according to integral time >
(f) Like this, if I control is used, overshoot is larger. According to system, large overshoot can be
problem. In order to solve this, PID control is used.
(5) Proportional integral derivative control (PID control)
In D control, when status of system changes rapidly, D control yields the output to reduce the
error. Namely, D control yields the output proportional to change velocity of current status. So if
D control is used, response speed of controller about status change of system increases, and
overshoot decreases. Output of controller by D control is as shown in expression 15.2.11.
.
(a) In the expression 15.2.11, Td means the time takes for MV
d
output by I control, to be added
into real output.
(b) Generally, D control is not used solely but with PD control. So PID control is expressed as
expression 15.2.12.
(c) The Figure 15.6 is simulation result when PID control is applied to above heating system.
dt
dE
TKEdt
T
K
KEMVMVMVMV
dp
i
P
PdiP
 Loading...
Loading...