User Manual CANopen/EtherCAT
43
[Chapter 8]
QUICK STOP ACTIVE status), you cannot quit the QUICK STOP
ACTIVE status, but you can switch to OPERATION ENABLE status
with the ENABLE OPERATION command.
FAULT REACTION ACTIVE:
Drive parameters have been changed.
An error has occurred.
The QUICK STOP function has been executed.
Drive function is enabled and power is connected to motor.
FAULT:
Drive parameters have been changed.
An error has occurred, the error response has been executed.
Power disconnection and connection depends on the application.
The drive function is deactivated.
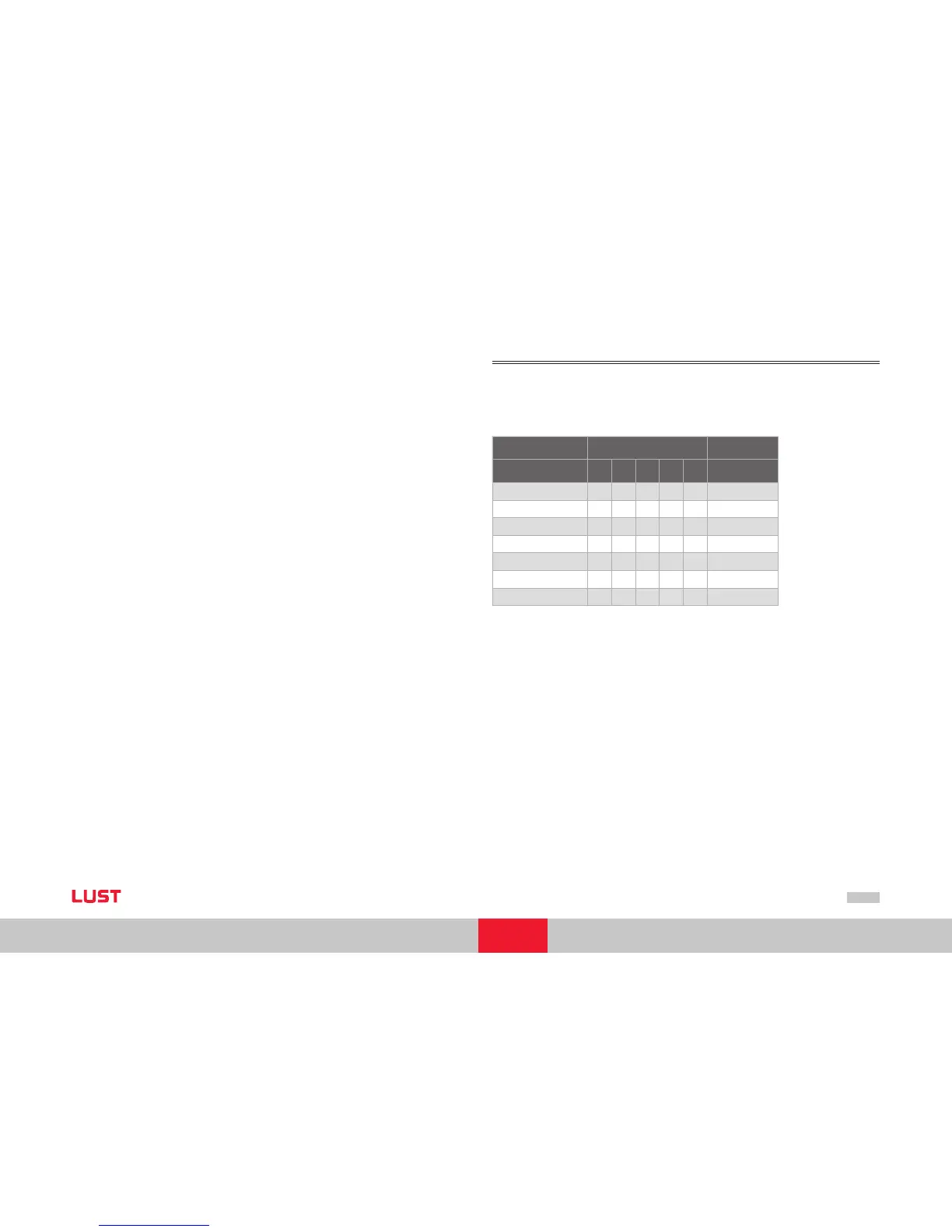
Bit combinations of the DRIVECOM state machine
Device control commands
The following bit combinations of control bits 0-3 and 7 form the device control com-
mands for the state transitions of the state machine:
Control word
Command 7 3 2 1 0 Transitions
SHUTDOWN 0 X 1 1 0 2, 6, 8
POWER-UP 0 X 1 1 1 3
DISABLE POWER 0 X X 0 X 7, 9, 10, 12
QUICK STOP 0 X 0 1 X 11
DISABLE OPERATION 0 0 1 1 1 5
ENABLE OPERATION 0 1 1 1 1 4
RESET FAULT 0>1 X X X X 15