User Manual CANopen/EtherCAT
44
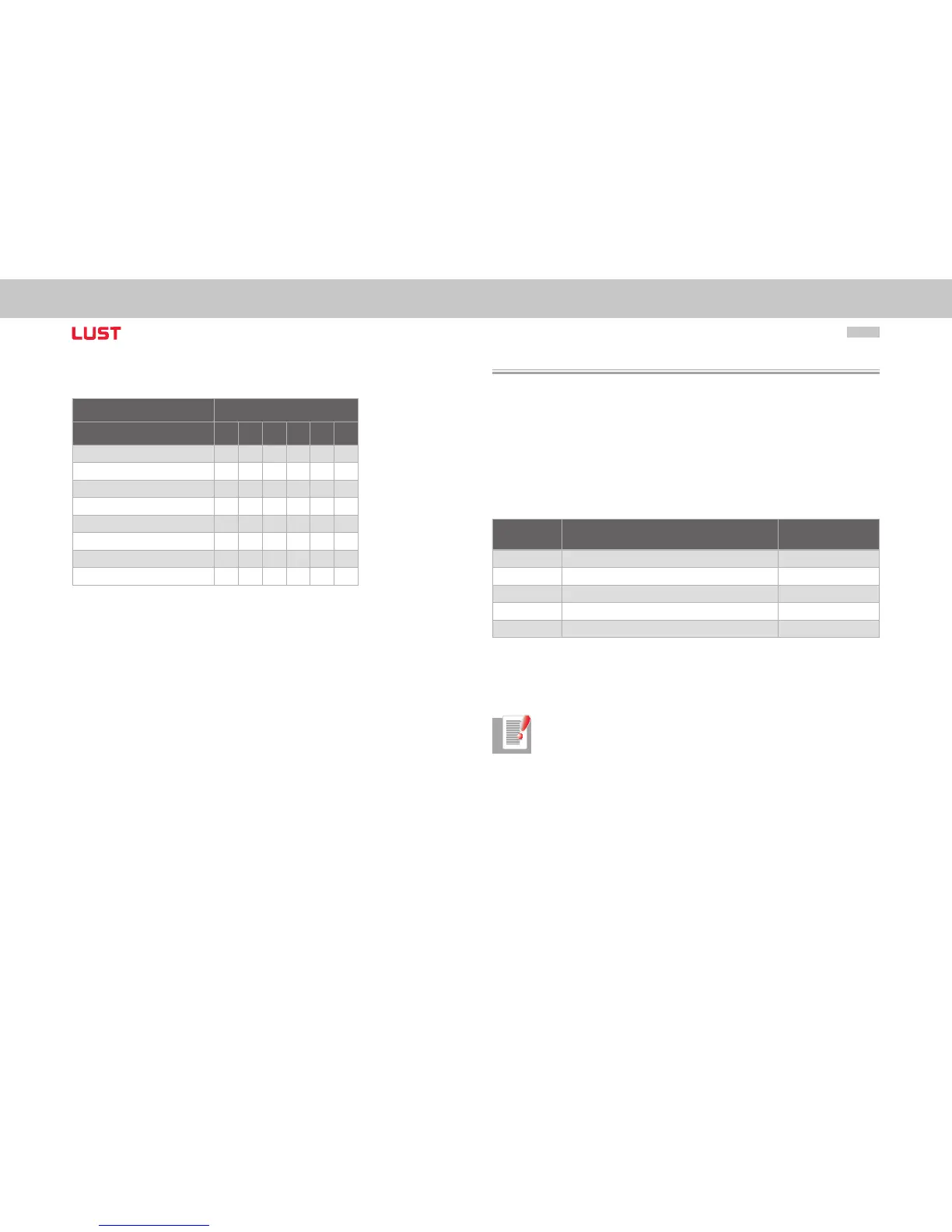
Device status table
The bits of the DRIVECOM status word presented below indicate the current system
state:
Status bit
State 6 5 3 2 1 0
NOT READY 0 X 0 0 0 0
SWITCH-ON INHIBIT 1 X 0 0 0 0
READY 0 1 0 0 0 1
ON 0 1 0 0 1 1
OPERATION ENABLED 0 1 0 1 1 1
FAULT 0 X 1 0 0 0
FAULT REACTION ACTIVE 0 X 1 1 1 1
QUICK STOP ACTIVE 0 0 0 1 1 1
Table Bit combinations of the DRIVECOM state machine
8.2 Option codes
The devices support option codes for four different options for shutting down the drive.
The four options are :
HALT function - interrupt an ongoing movement
Controller disable function - stop movement by cancelling the controller enable
(software)
Quick-stop function - stop movement by initiating a quick stop
Error reaction function - stop movement in case of an error
For all variants, the option code sets the parameters for the desired device response.
CANopen Function
Supported
settings
Object 605Ah Quick stop option code 0 to 8
Object 605Bh Shutdown option code -1 to 1
Object 605Ch Disable operation option code 0 and 1
Object 605Dh Halt Option Code 0 to 4
Object 605Eh Fault Reaction Option Code 0 to 4
Table Option codes
The objects form part of the data set as standard parameters of the devices.
Note: The quick-stop ramp is always executed with the smoothing preset
for the driving profile ramps. The error stop ramp is always executed without
smoothing, even when smoothing is programmed.
•
•
•
•