OM-291865 Page 29
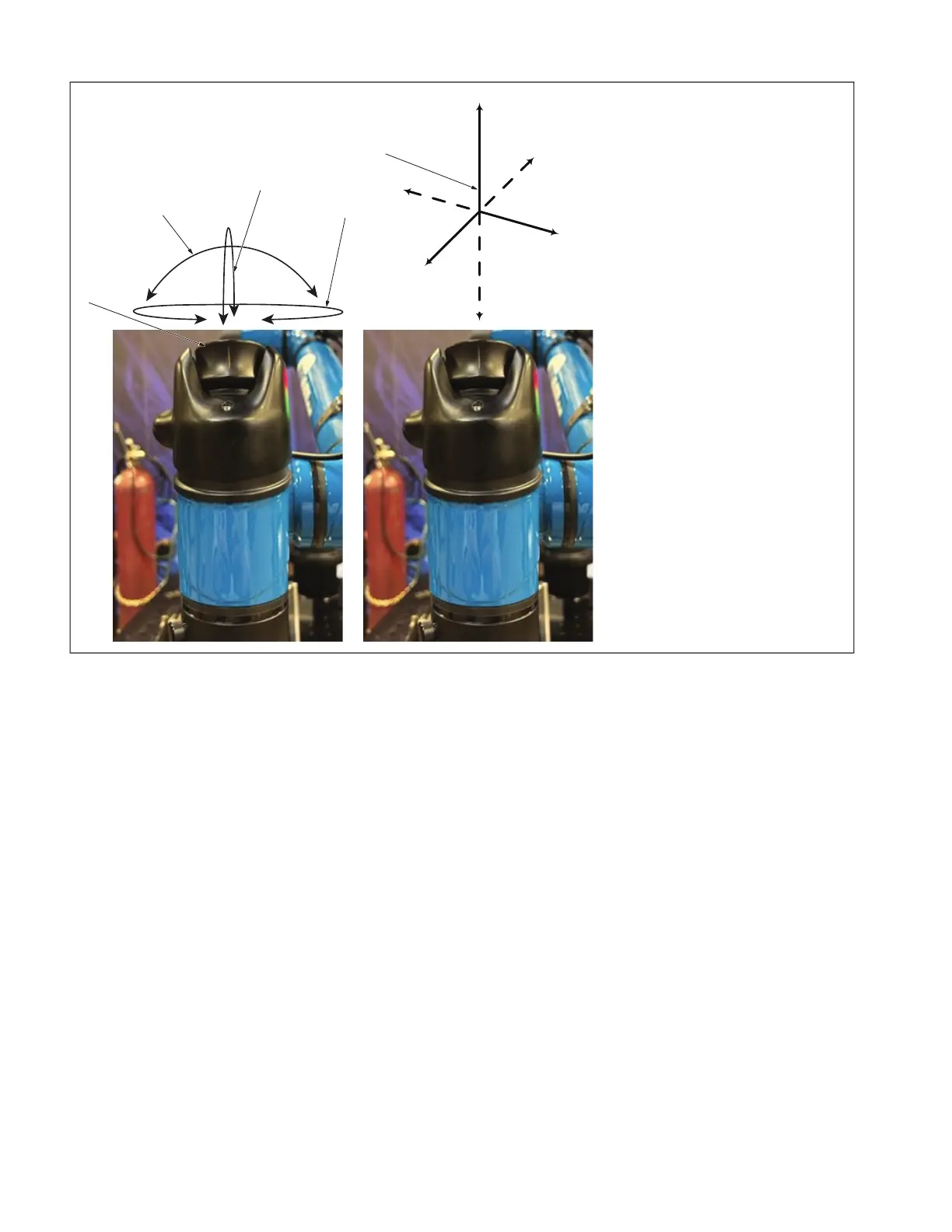
6-4. Moving The Cobot With The Joystick
1 Joystick
2 Roll
3 Pitch
4 Yaw
5 World Frame
Grasp the joystick with fingers
Moving the joystick up/down, left/right, or for-
ward/backward will cause the manipulator to
move in that direction in the world frame.
Rotate or twist the joystick in pitch/yaw/roll
directions about the world frame.
F
Cobot motion controlled by the joystick
is slow and precise. Joystick adjust-
ments are generally used for fine tun-
ing the cobot position and orientation.