OM-291865 Page 28
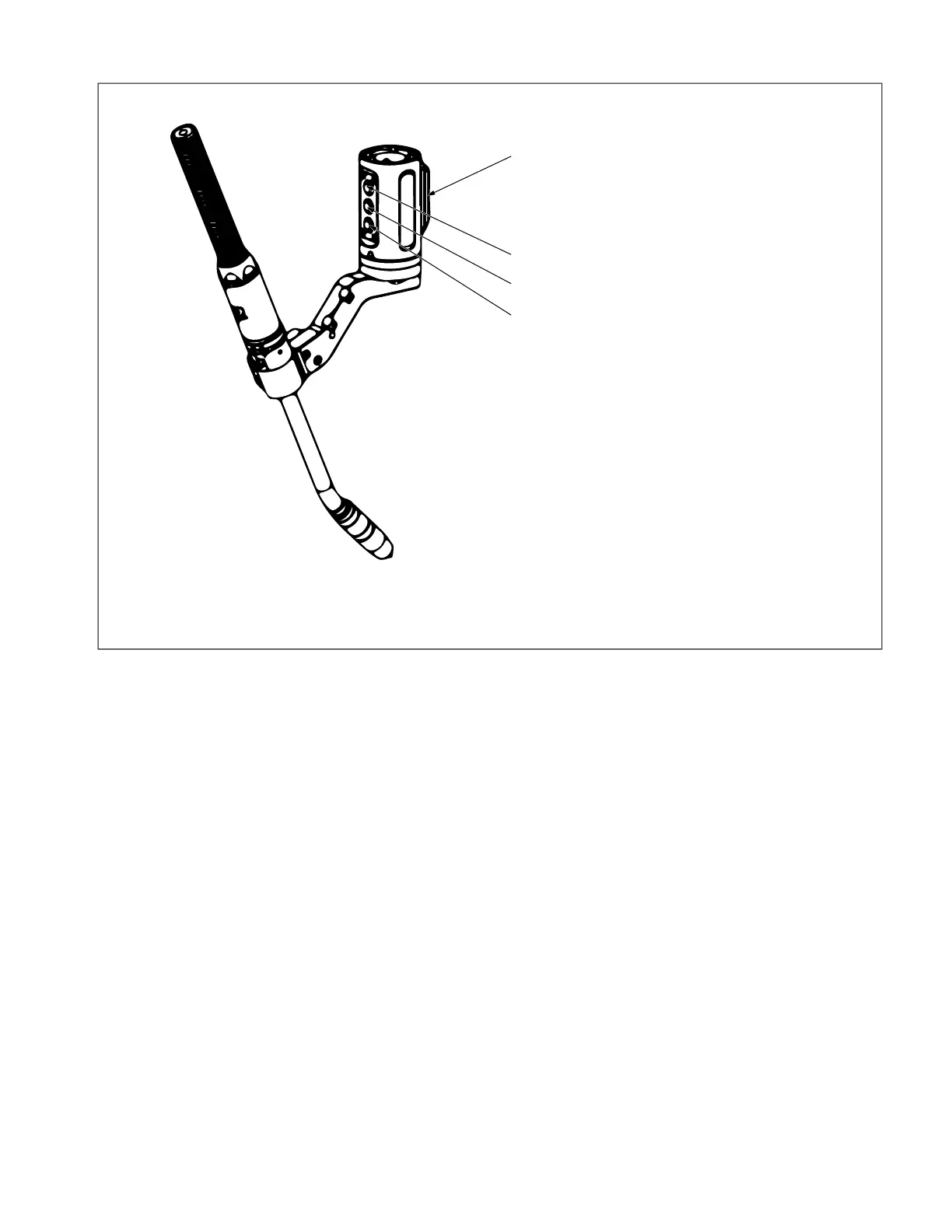
6-3. Puck Buttons
1 Free Drive Enable 3–Position Switch
The switch enables the programmer to move
the robot to a position by dragging the robot
while this switch is in the ON (Middle)
position.
In the normal (not depressed) state, the
switch is typically used to prevent the cobot
from operating. In the middle position, the
switch allows the operator to manually drive
the cobot arm into position. When the switch
is fully depressed, it locks the arm in place.
2 Air Point Store
Pressing this button stores a non-weld posi-
tion point and a weld end point.
3 Weld Point Store
Pressing this button stores a weld position
point.
4 Linear/Circular
Press this button to toggle between a linear
weld point and a circular weld point.