3.5.2 Encoder type
(1) Operation mode
Motor speed
t----\
Orientation
command
(ORC)
-
!
/
Mark pulse
l-l
n
I-l
h
1
I
l-l
l-l
Orientation
complete
J---L
(ORAI-ORA
(2)
Operation
(a)
lb)
(cl
(d)
(e)
(f)
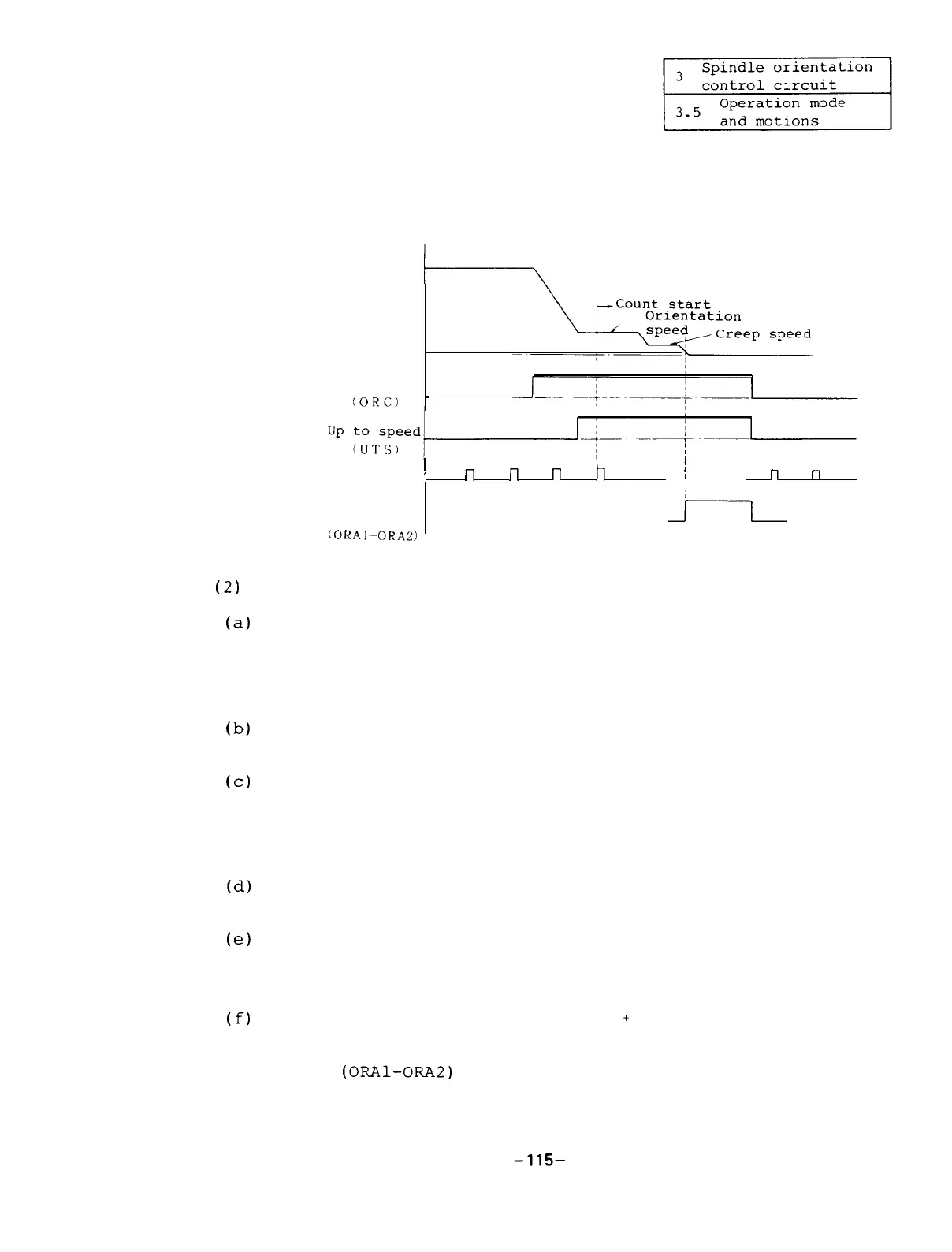
When the orientation command is turned on, the orien-
tation position being specified by the parameter PST
is read and the motor speed is changed from the opera-
tion speed to the orientation speed.
When the motor speed reaches the orientation speed, the
up to speed signal is turned on.
After the up to speed signal is turned on, when a mark
pulse is received,
the counting starts.
At the time the motor speed remains as the orienta-
tion speed.
Before 146 to 225 deg. of the target value, the orien-
tation speed is changed to the creep speed.
Before 15 to 25 deg. of the target value, the position
loop becomes valid and the spindle stops at the target
value.
In the range of the target value
+
in-position range
(parameter ZRZ),
the contact of the orientation complete
signal
(ORAl-ORA2)
is closed.
-115-

 Loading...
Loading...