2 Robot arm
Tooling
2-17
2.5 Tooling
2.5.1 Wiring and piping for hand
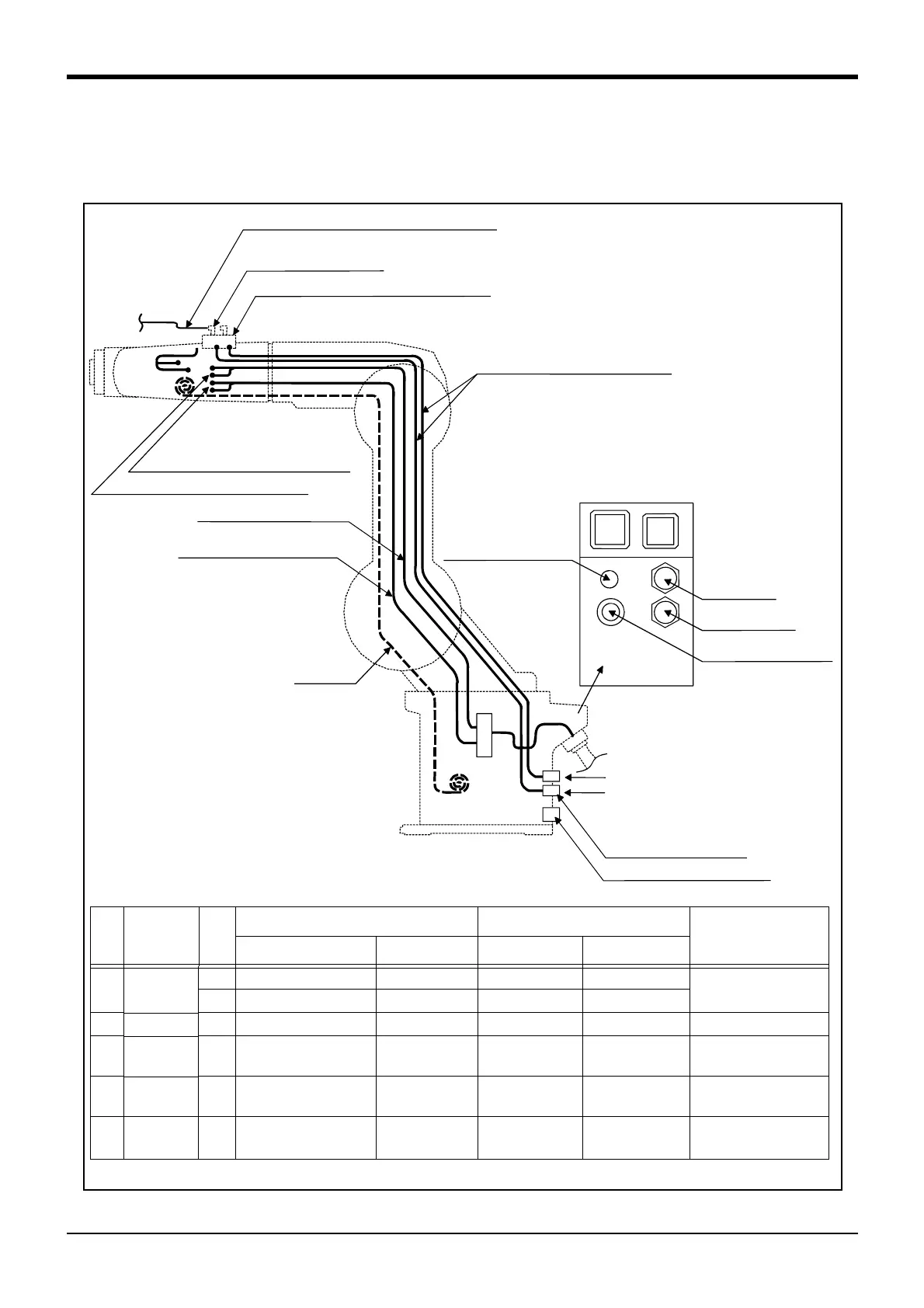
Shows the wiring and piping configuration for a standard-equipped hand.
Fig.2-7 : Wiring and piping for hand
AIRIN
RETURN
CN2
CN1
AIRIN(φ6)
RETURN(φ6)
SPARE WIRE INLET
VACUUM(φ8)
Note1)
Spare wiring
Hand output signal cable
Hand input signal cable
(3)Hand input signal connector
(4)Hand output signal connector
Secondary piping pneumatic hose (φ4)
(customer-prepared)
(1)φ4 quick coupling
Solenoid valve set (option)
* Use by connecting it with the hand
output signal connector.
(2)φ6 quick coupling
(5)φ8 quick coupling
Note1)
Primary piping pneumatic hose
Connector and pneumatic coupling
No Name Qty.
Robot side (Robot arm side) Counter side (customer-prepared)
Manufacturer
Connectors, couplings Connector pins Connector Connector pins
(1) Coupling 4 KJW04-M3 - - - SMC Corporation
4 KJL04-M3 - - -
(2) Coupling 2 UKBL6 - - - Koganei Corporation
(3) Connector 2 1-1717834-3 1318108-1 1-1318115-3 1318112-1 Tyco Electronics
AMP K.K.
(4) Connector 2 1-1717834-4 1318108-1 1-1318115-4 1318112-1 Tyco Electronics
AMP K.K.
(5) Coupling
Note1)
Note1) For dust suction in the clean specification
1 UKBL8 - - - Koganei Corporation

 Loading...
Loading...



