3-86
Options
3Controller
(7) CC-Link interface
■ Order type: ● 2A-HR575-E
■ Outline
The CC-Link interface is the option to not only add bit data to the robot controller.
but also to add CC-Link field network function that allows cyclic transmission of
word data.
Caution) This option can only be used with the robot controller's main unit software
version E1 or later.
■ Configuration
Table 3-29 : Configuration deviceon
Table 3-30 : Procured by the customer
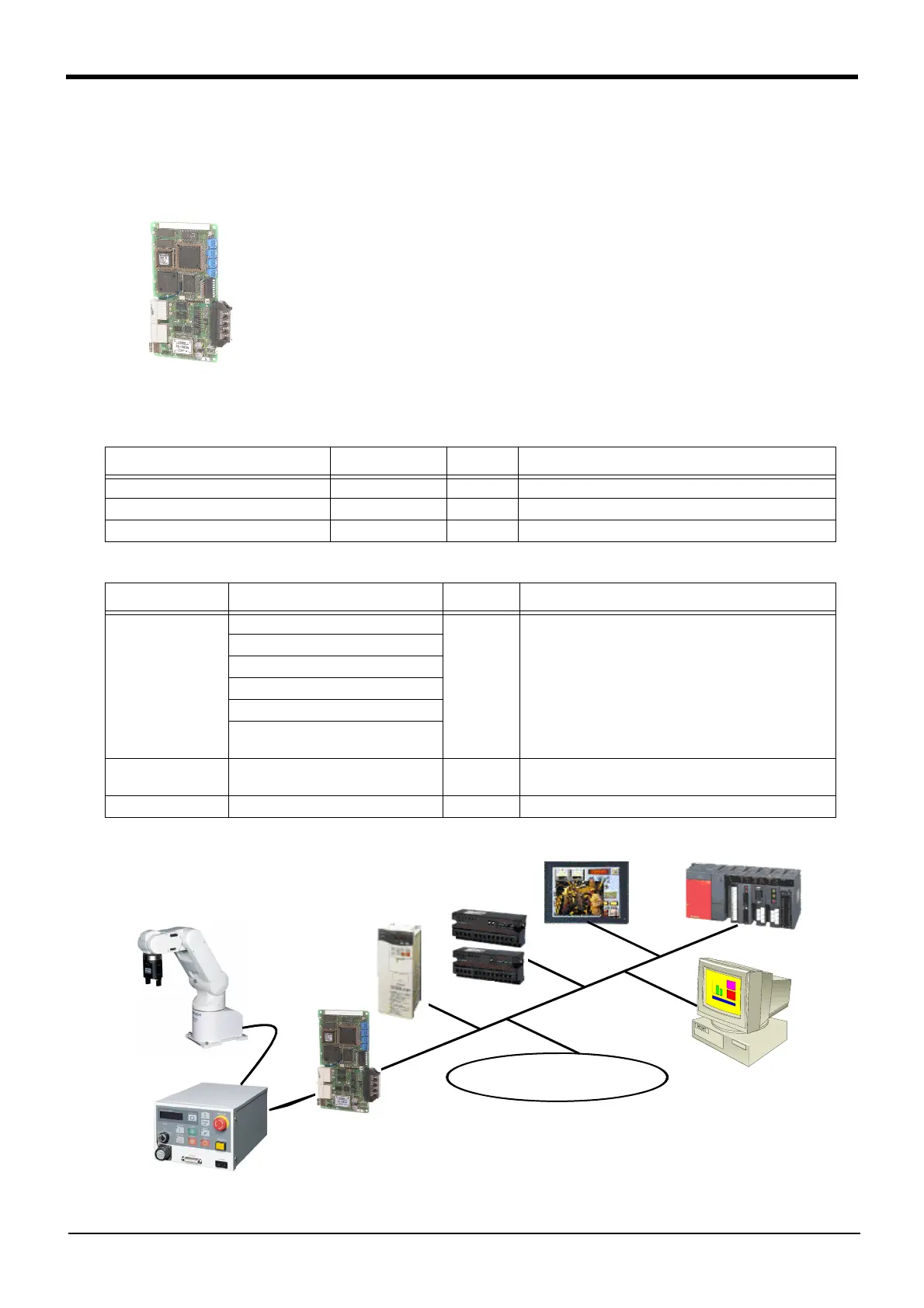
Fig.3-36 : Example of CC-Link Product Configuration
Part name Type Qty. Remarks
CC-Link interface 2A-HR575-E 1
Instruction Manual BFP-A8105 1
Ferrite core E04SR301334 2 Be sure to install this for noise countermeasure.
Part name Type Qty. Remarks
Master station
QJ61BT11(Q series)
1 FX series products are not supported.
AJ61QBT11(QnA series)
A1SJ61QBT11(QnAS series)
AJ61BT11(A series)
A1SJ61BT11(AnS series)
A80BD-J61BT11(personal computer
board)
Communication cable - 1
Shielded 3-core twisted cable
This cable may be manufactured by the customer.
Terminal resistor - 1 110Ω or 130Ω is recommended.
Cc-Link interface
(this option)
Partner manufacturers' devices
I/O unit
Display
Sequencer
Robot arm
Controller
Personal computer
Inverter

 Loading...
Loading...



