3. SIGNALS AND WIRING
3 - 45
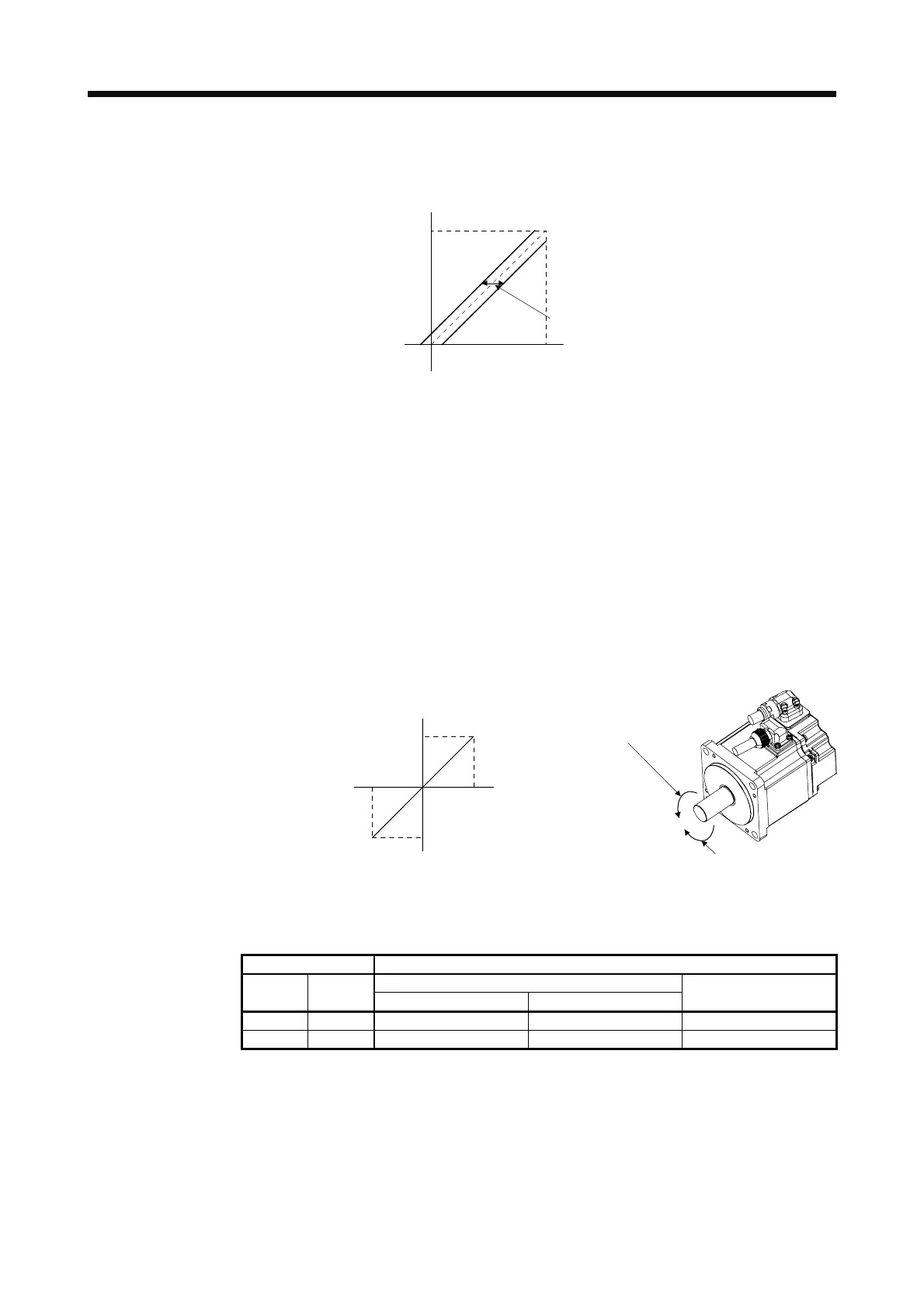
(b) Analog torque command offset
Using [Pr. PC38], the offset voltage of -9999 mV to 9999 mV can be added to the TC applied voltage
as follows.
TC applied voltage [V]
Maximum torque
Torque
0 8 (-8)
[Pr. PC38]
offset range
-9999 mV to 9999 mV
(2) Torque limit
By setting [Pr. PA11 Forward rotation torque limit] or [Pr. PA12 Reverse rotation torque limit], torque is
always limited to the maximum value during operation. A relation between limit value and servo motor
torque is as in section 3.6.1 (5).
Note that TLA (Analog torque limit) is unavailable.
(3) Speed limit
(a) Speed limit value and speed
The speed is limited to the values set with [Pr. PC05 Internal speed limit 0] to [Pr. PC11 Internal
speed limit 7] or the value set in the applied voltage of VLA (Analog speed limit). A relation between
VLA (Analog speed limit) applied voltage and the servo motor speed is as follows.
When the servo motor speed reaches the speed limit value, torque control may become unstable.
Make the set value more than 100 r/min greater than the desired speed limit value.
Speed
[r/min]
CW
direction
0
CCW direction
+10
-10
VLA applied voltage [V]
Forward rotation
(CCW)
Reverse rotation
(CW)
Rated speed [r/min]
Rated speed [r/min]
The following table indicates the limit direction according to RS1 (Forward rotation selection) and
RS2 (Reverse rotation selection) combination.
(Note) Input device Speed limit direction
VLA (Analog speed limit)
RS1 RS2
Polarity: + Polarity: -
Internal speed command
1 0 CCW CW CCW
0 1 CW CCW CW
Note. 0: Off
1: On
 Loading...
Loading...
