5. PARAMETERS
5 - 52
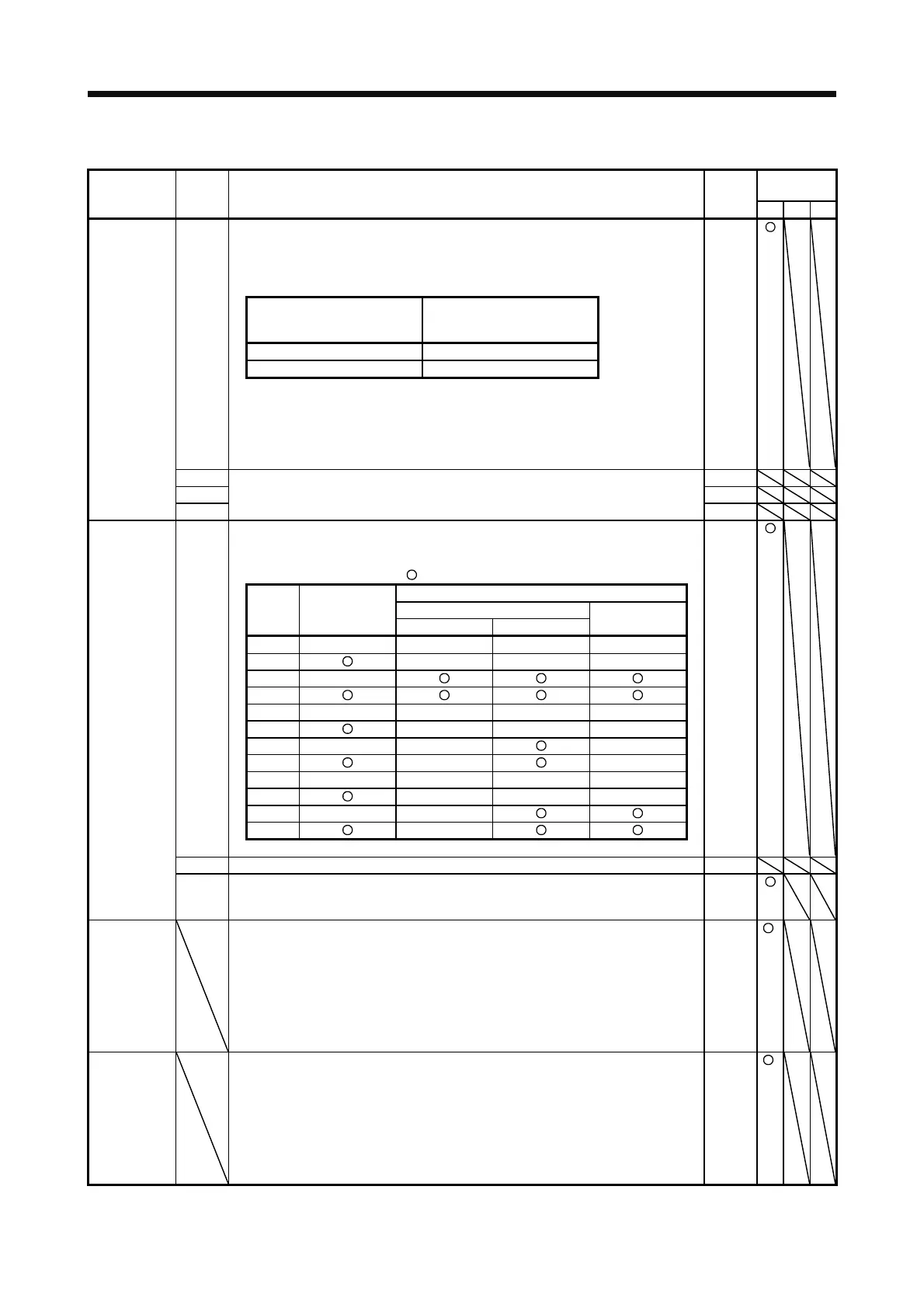
5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ])
Control
mode
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
P S T
_ _ _ x Fully closed loop function selection
The fully closed loop function is selected.
0: Always enabled
1: Switching with CLD (Fully closed loop control selection)
0h PE01
*FCT1
Fully closed
loop function
selection 1
Selection using
the fully closed loop control
selection (CLD)
Control method
Off Semi closed loop control
On Fully closed loop control
To enable the setting, select "Fully closed loop control mode (_ _ 1 _)" of "operation
mode selection" in [Pr. PA01].
Selecting the "switching with CLD (Fully closed loop control selection)" will trigger
[AL. 37] while "absolute position detection system selection" is "Enabled (absolute
position detection system by DIO) (_ _ _ 1)" in [Pr. PA03] .
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ 0h
_ _ x x Fully closed loop control error detection function selection
Select the fully closed loop control error detection function.
: Error detection enabled -: Error detection disabled
03h
PE03
*FCT2
Fully closed
loop function
selection 2
Position deviation error
During servo-on
Setting
value
Speed
deviation error
With command Command 0
During servo-
off
_ _ 0 0 - - - -
_ _ 0 1 - - -
_ _ 0 2 -
_ _ 0 3
_ _ 1 0 - - - -
_ _ 1 1 - - -
_ _ 1 2 - - -
_ _ 1 3 - -
_ _ 2 0 - - - -
_ _ 2 1 - - -
_ _ 2 2 - -
_ _ 2 3 -
_ x _ _ For manufacturer setting 0h
x _ _ _ Fully closed loop control error reset selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
0h
PE04
*FBN
Fully closed
loop control -
Feedback
pulse
electronic
gear 1 -
Numerator
Set a numerator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
Setting range: 1 to 65535
1
PE05
*FBD
Fully closed
loop control -
Feedback
pulse
electronic
gear 1 -
Denominator
Set a denominator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
Setting range: 1 to 65535
1
 Loading...
Loading...
