17. FULLY CLOSED LOOP SYSTEM
17 - 20
(b) Position deviation error detection
Set [Pr. PE03] to "_ _ _ 2" to enable the position deviation error detection.
Position deviation error detection
2
[Pr. PE03]
Comparing the servo motor-side feedback position (2)) and load-side feedback position (4)), if the
deviation is not less than the set value (1 kpulses to 20000 kpulses) of [Pr. PE07 Fully closed loop
control position deviation error detection level], the function generates [AL. 42.1 Servo control error
by position deviation] and stops the motor. The initial value of [Pr. PE07] is 100 kpulses. Change the
set value as necessary.
(c) Detecting multiple deviation errors
When setting [Pr. PE03] as shown below, multiple deviation errors can be detected. For the error
detection method, refer to (2) (a), (b) in this section.
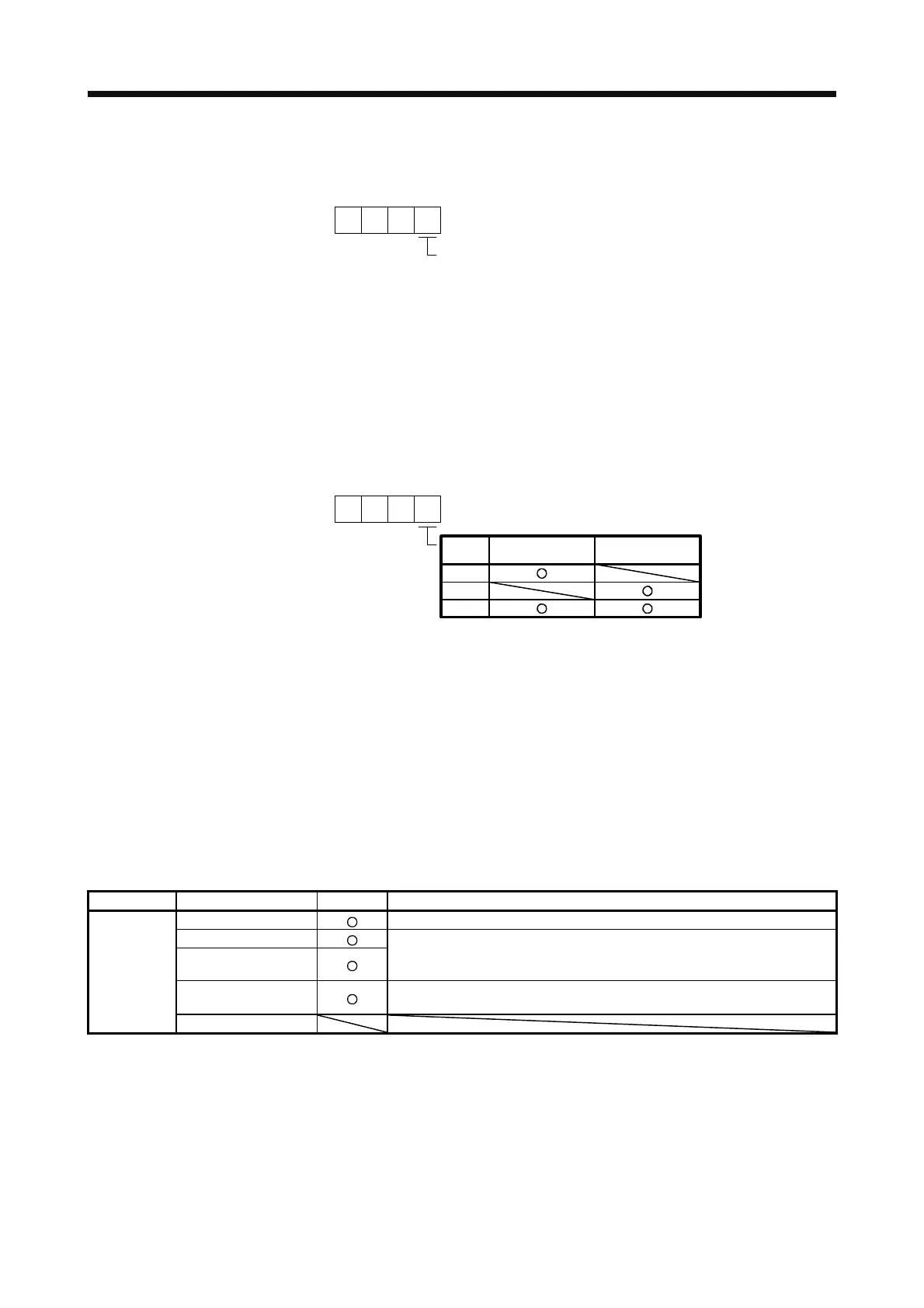
[Pr. PE03]
Setting
value
Speed deviation
error detection
Position deviation
error detection
1
2
3
17.3.4 Auto tuning function
Refer to section 6.3 for the auto tuning function.
17.3.5 Machine analyzer function
Refer to Help of MR Configurator2 for the machine analyzer function of MR Configurator2.
17.3.6 Test operation mode
Test operation mode is enabled by MR Configurator2.
For details on the test operation, refer to section 4.5.9.
Function Item Usability Remarks
JOG operation
It drives in the load-side encoder resolution unit
Positioning operation
Program operation
The fully closed loop system is operated in the load-side encoder resolution
unit.
For details, refer to section 4.5.9 (5).
Output signal (DO)
forced output
Refer to section 4.5.9 (6).
Test
operation
mode
Motor-less operation
 Loading...
Loading...
