moog
MSD Servo Drive User Manual SERCOS II
29
[ Chapter 5 ]
5.4 Interface faults and diagnostic options
If states are identified in the drive which no longer permit correct operation of the inter-
face, or if faulty inputs are detected during the initialization phase, the drive responds by
falling back to communication phase 0.
No more drive telegrams are sent, the drive autonomously executes the programmed
fault reaction and waits for re-initialization of the SERCOS loop by the master.
5.4.1 Diagnosis of interface status
To diagnose interface fault and identify the current communication phase, parameter
S-0-0014 (Interface status) is used.
If a fault is set in the interface status, the communication fault in C1D (S-0-0011) is reset.
Setting bits 2-0 causes no fault. If there is no communication fault, the interface status
in bits 0-2 contains the current communication phase. If there is a communication fault,
the fault and the communication phase are saved. The communication fault is only
cleared by the drive and reset to “0” when there are no more interface faults occurring
and the “Reset state class 1” command (S-0-099) has been received by the drive over the
service channel.
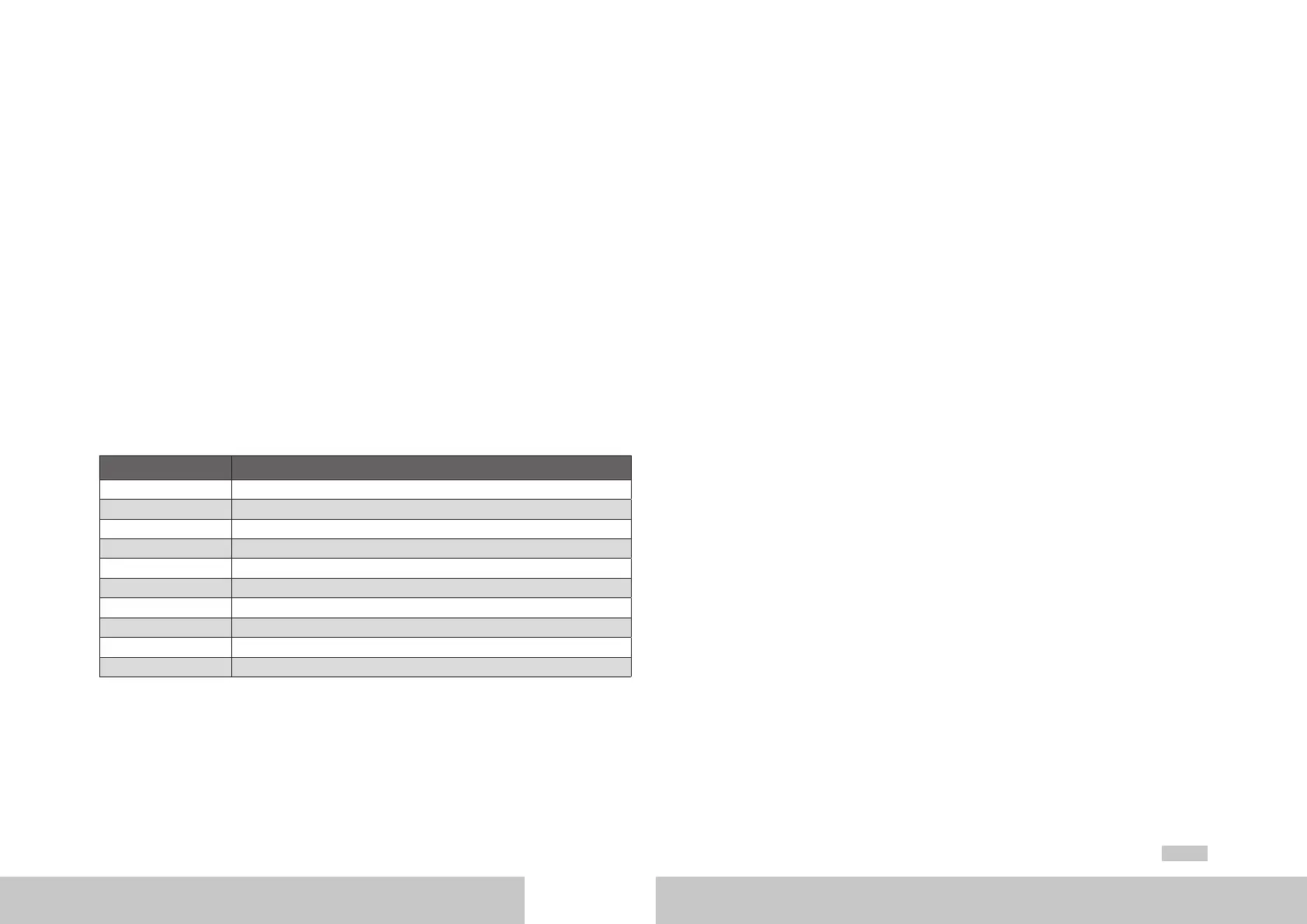
Bit Explanation
Bit 0-2 Communication phase
Bit 3 MST failure
Bit 4 MDT failure
Bit 5 Invalid communication phase (phase > 4)
Bit 6 Fault in phase sequencing (invalid sequence)
Bit 7 Fault in phase fallback (not to phase 0)
Bit 8 Phase change without ready message
Bit 9 Change to non-initialized operation mode
Bit 10 Drive with same address in loop
Bit 11-15 Reserved
Table 5.4 Coding of parameter S-0-0014 (interface status)
5.4.2 Fault counter for telegram failures
In the drive, each received master sync and master data telegram is monitored for con-
formance
• to the correct reception time;
• to the agreed telegram length; and
• to the correct CRC checksum.
Failure of a telegram is registered by incrementing a fault counter. The two parameters
S-0-0028 (MST fault counter) and S-0-0029 (MDT fault counter) exist for the purpose. The
content of parameter S-0-0028 is cleared on the transition from communication phase 2 to
3; the content of parameter S-0-0029 is cleared on the transition from phase 3 to 4.