moog
MSD Servo Drive User Manual SERCOS II
37
[ Chapter 6 ]
6.4 Position control without tracking error
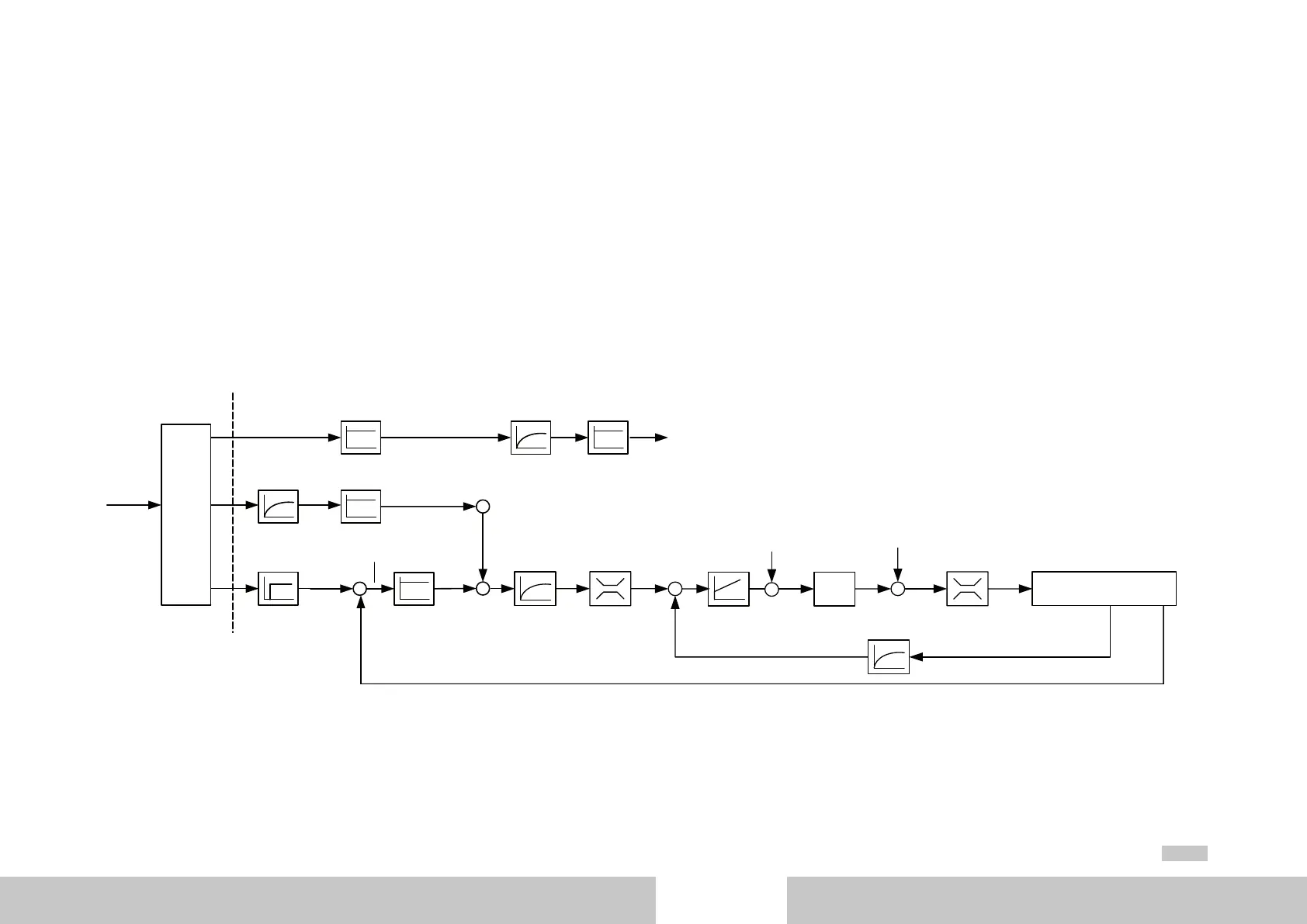
6.4.1 In-drive generation of pre-control signals
In this operation mode the master cyclically dictates position setpoints. The drive per-
forms a fine-interpolation between the position setpoints and also calculates the speed
and acceleration pre-control signals. The position setpoint can be delayed for a configu-
rable number of servo drive cycles P-0-0558. The amplitudes of the delay signals can be
scaled via parameters S-0-0296 (speed pre-control) and S-0-0348 (acceleration pre-con-
trol). The speed pre-control signal is smoothed by way of a P-T1 element with the filter
time constant P-0-0555 and overlaid on the speed setpoint generated by the servo drive.
The acceleration pre-control signal is converted via the mass moment of inertia of the
drive set in parameter P-0-0314 into a torque pre-control signal which is overlaid on the
torque setpoint generated by the speed drive.
Figure 6.4
p
ref
-
Interpolation
n
refFF
m
refFF
S-0-0051
S-0-0053
G(s)
-
S-0-0100
S-0-0101
S-0-0040
S-0-0156
Torque-controlled
motor
S-0-0081
alternatively
S-0- 0322
GnFF(s)
Gru(s)
GmFF(s)
S-0-0104
alternatively
S-0-0360
S-0-0296
alternatively
S-0-0375
S-0-0348
alternatively
S-0-0376
P-0-1516
P-0-0371
P-0-0458
P-0-0328
P-0-0333
P-0-0334
P-0-0167
P-0-0329
P-0-0330
P-0-0331
P-0-0332
P-0-0460
P-0-0325
P-0-0326
P-0-0327
P-0-0351
P-0-0414
P-0-0374
P-0-0372
P-0-0554
S-0-0047
P-0-0378
P-0-0320
P-0-0321
Schematic diagram of position control without tracking error with internal pre-control
signals