moog
MSD Servo Drive User Manual SERCOS II
55
[ Chapter 10 ]
10 Parameter access via the
service channel
The service channel is used for parameter setting and diagnosis. Transfer via the service
channel is handled bit-by-bit in segments in the MDT and in the DT, and may extend
over several SERCOS cycles for each transferred element. The following tables contain
the list of parameters implemented in the drive (operational data).
NOTE: The functional descriptions of the manufacturer specific parameters
- where not given here - are to be found in the MSD Servo Drive Operation
Manual.
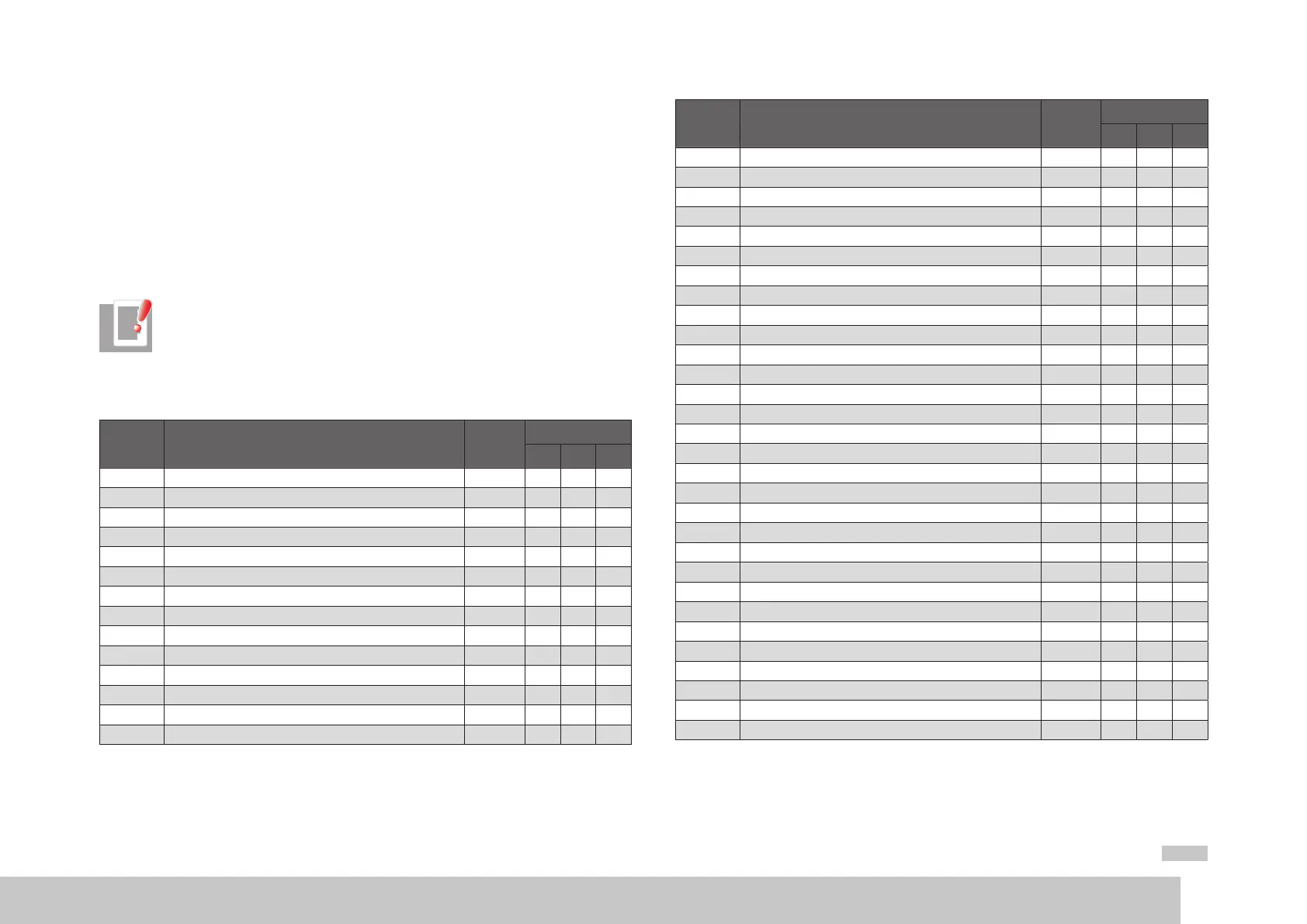
10.1 SERCOS parameter list
IDN Description Unit
Write protection
CP2 CP3 CP4
S-0-0001 Control unit cycle time (t_Ncyc) us x x
S-0-0002 Communication cycle time (t_Scyc) us x x
S-0-0003 Shortest AT transmission starting time (t1min) us x x x
S-0-0004 Transmit/receive transition time (tATMT) us x x x
S-0-0005 Minimum feedback processing time (t5) us x x x
S-0-0006 AT transmission starting time (t1) us x x
S-0-0007 Feedback acquisition capture point (t4) us x x
S-0-0008 Command value valid time (t3) us x x
S-0-0009 Position of data record in MDT x x
S-0-0010 Length of MDT x x
S-0-0011 Class 1 diagnostic x x x
S-0-0012 Class 2 diagnostic x x x
S-0-0013 Class 3 diagnostic x x x
S-0-0014 Interface status x x x
Table 10.1 List of supported SERCOS parameters
IDN Description Unit
Write protection
CP2 CP3 CP4
S-0-0015 Telegram type x x
S-0-0016 Configuration list of AT x x
S-0-0017 IDN list of all operation data x x x
S-0-0018 IDN list of operation data for CP2 x x x
S-0-0019 IDN list of operation data for CP3 x x x
S-0-0021 IDN list of invalid operation data for CP2 x x x
S-0-0022 IDN list of invalid operation data for CP3 x x x
S-0-0023 IDN list of invalid operation data for CP4 x x x
S-0-0024 Configuration list of MDT x x
S-0-0025 IDN list of all procedure commands x x x
S-0-0026 Configuration list for signal status word
S-0-0027 Configuration list for signal control word
S-0-0028 MST error counter x x x
S-0-0029 MDT error counter x x x
S-0-0030 Firmware version of device x x x
S-0-0032 Primary operation mode x
S-0-0033 Secondary operation mode 1 x
S-0-0034 Secondary operation mode 2 x
S-0-0035 Secondary operation mode 3 x
S-0-0036 Velocity command value SPEED
S-0-0037 Additive velocity command value SPEED
S-0-0038 Positive velocity limit value SPEED
S-0-0039 Negative velocity limit value SPEED
S-0-0040 Velocity feedback value 1 SPEED x x x
S-0-0041 Homing velocity for ‚drive controlled homing‘ SPEED
S-0-0042 Homing acceleration for ‚drive controlled homing‘ ACC
S-0-0043 Speed polarity parameter x x
S-0-0044 Velocity data scaling type x x
S-0-0045 Velocity data scaling factor x x
S-0-0046 Velocity data scaling exponent x x
Table 10.1 List of supported SERCOS parameters