moog
MSD Servo Drive User Manual SERCOS II
45
[ Chapter 7 ]
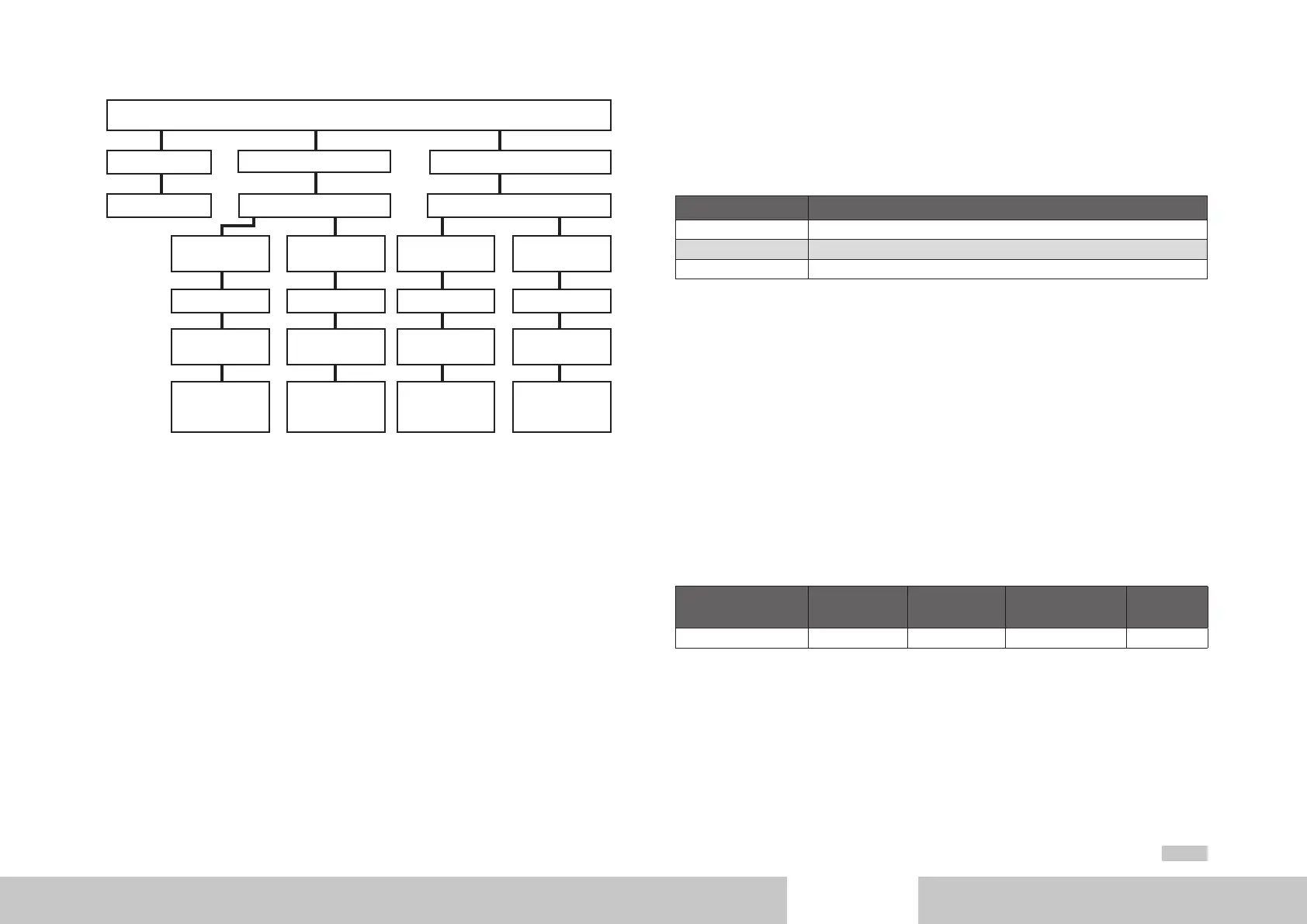
Linear
Rotational
Load or motor Load or motor
Preferred
scaling
Preferred
scaling
Parameter
scaling
Parameter
scaling
s
2
or s
3
s
2
or s
3
s
2
or s
3
s
2
or s
3
Metre
Metre
Radian Radian
LSB = 10
-6
m/s
2(3)
LSB = 10
-3
rad/s
2(3)
Variable
LSB weight
Variable
LSB weight
Accelaration data scaling type (IDN00160)
Load or motor
None
IDN 00160 bit 0-2
IDN 00160 bit 6
IDN 00160
bit 3
IDN 00160
bit 5
IDN 00160
bit 4
(IDN 00161)
(IDN 00162)
(IDN 00161)
(IDN 00162)
Figure 7.3 Diagram of acceleration weighting methods
7.4 Weighting of torque and force data
The torque/force weighting is defined by the parameters listed in the following table.
All torque/force data of the drive (e.g.: setpoint, actual and limit values) are subject to
the preset weighting.
IDN Description
S-0-0086 Weighting method for torque/force data
S-0-0093 Weighting factor for torque/force data
S-0-0094 Weighting exponent for torque/force data
Table 7.16 Scaling parameter for torque/force weighting
7.4.1 Percentage weighting of torque and force data
The percentage weighting is set via the weighting method (S-0-0086). No other param-
eters are required. In percentage weighting the permanently permissible standstill torque
of the motor (S-0- 0111) is used as the reference value. All torque/force data is given in %
with one decimal place.
7.4.2 Weighting of force data
The weighting of force data is set via parameter S-0-0086. The significance of the LSB of
the force data is defined by the following equation:
LSBsignicance=Unit•S-0-0093•10
S-0-0094
When preferential force weighting is selected, the weighting as per the following table
applies.
Weighting method
(from S-0-0086)
Unit
(from S-0-0086)
Weighting
factor (S-0-0093)
Weighting
exponent (S-0-0094)
Preferential
weighting
linear N 1 0 1 N
Table 7.17 Preferential weighting of force data