moog
MSD Servo Drive User Manual SERCOS II
31
[ Chapter 6 ]
6 Operation modes
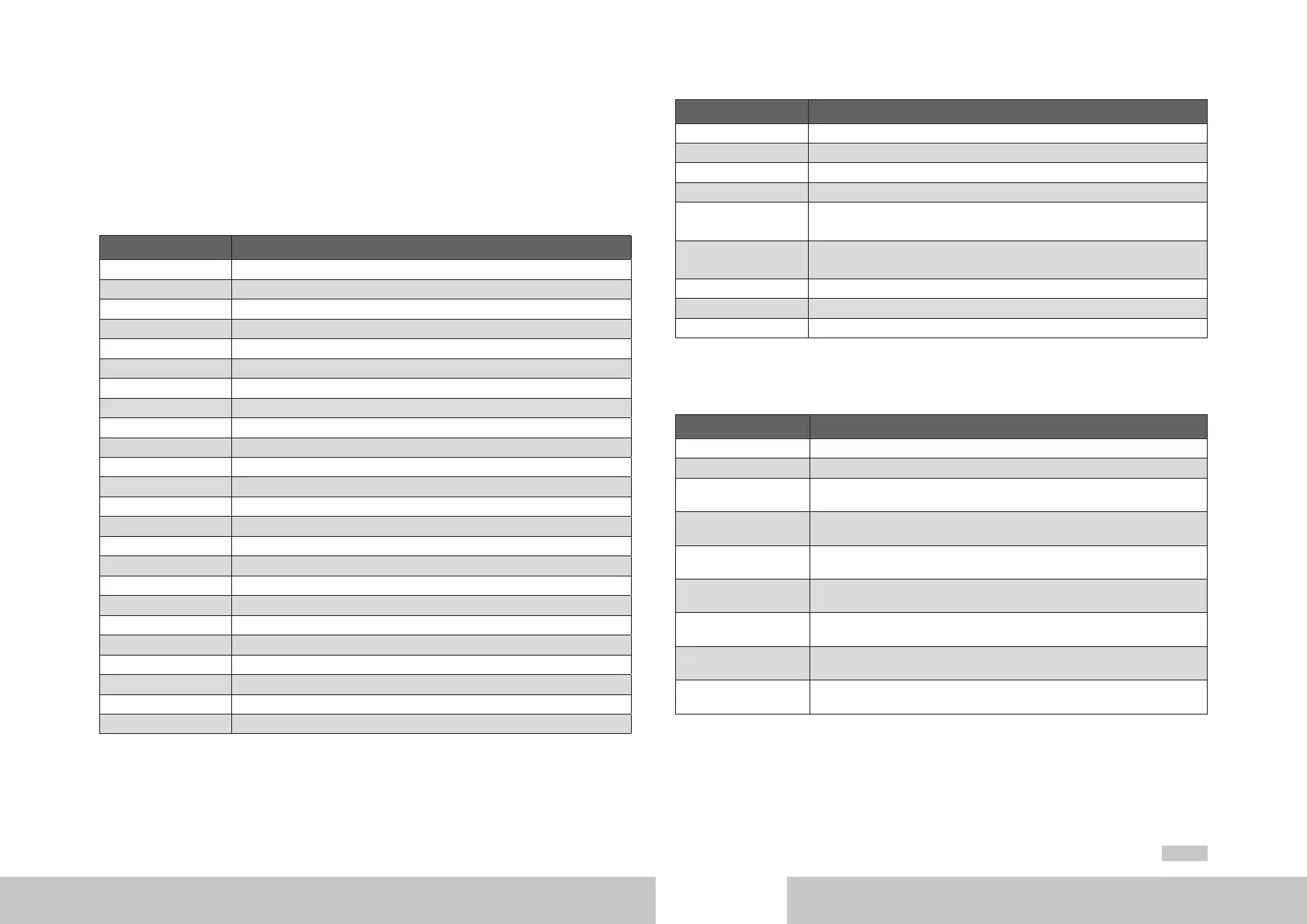
The operation modes selectable in the master control word and displayed in the drive
status word conforming to the SERCOS specification are coded according to the scheme
set out in the following table.
Bit Explanation
Bit 15
0 SERCOS standard mode
1 Manufacturer specific mode
Bit 14
0 Cyclic setpoints (for all modes)
1 Setpoints via service channel
Bits 13-10 (reserved)
Bits 9-0
00 0000 0000 No mode defined
00 0000 0001 Torque control
00 0000 0010 Flux Control
xx xxxx x011 Position control with position encoder 1 (motor encoder)
xx xxxx x100 Position control with position encoder 2 (external encoder)
xx xxxx x101 Position control with position encoders 1 and 2 (not supported))
00 0000 0110 (reserved)
00 0000 0111 Uncontrolled mode
Bit 3
0 1. Position control with tracking error
1 Position control without tracking error
Bits 9-4
00 0000 Simple mode
0x 0001 Drive-controlled interpolation
1x 0001 Drive-controlled positioning
xx 0010 (reserved)
Table 6.1 Operation mode coding
Bit Explanation
00 0011 (reserved)
xx 0100 Synchronous mode (not supported)
xx 1000 Electronic gearing (not supported)
Bit 9
0 Loop control with absolute setpoint input
- Activation of positioning with IPOSYNC
1 Loop control with relative setpoint input
- Activation of non-cyclic commands with S-0-0346
Bit 8
0 Without drive-controlled mode switching
1 With drive-controlled mode switching
Table 6.1 Operation mode coding
The operation modes supported by the MSD Servo Drive are listed in parameter
S-0-0292.
Operation mode Description
0000 0000 0000 0001 Torque control
0000 0000 0000 0010 Speed control, drive-controlled profile generation with parameterized ramps
0000 0000 0000 0110 Speed control, master control system-controlled profile generation, no track-
ing error
0000 0000 0000 0011 Position control with position encoder 1 (e.g. motor encoder), master control
system-controlled profile generation, no use of pre-control signals
0000 0000 0000 0100 Position control with position encoder 2 (e.g. external encoder), master con-
trol system-controlled profile generation, no use of pre-control signals
0000 0000 0000 1011 Position control with position encoder 1 (e.g. motor encoder), master control
system-controlled profile generation, with use of pre-control signals
0000 0000 0000 1100 Position control with position encoder 2 (e.g. external encoder), master con-
trol system-controlled profile generation, with use of pre-control signals
0000 0000 0001 0011 Position control with position encoder 1 (e.g. motor encoder), drive-controlled
profile generation, no use of pre-control signals
0000 0000 0001 0100 Position control with position encoder 2 (e.g. external encoder), drive-con-
trolled profile generation, no use of pre-control signals
Table 6.2 Supported operation modes (S-0-0296)