moog
MSD Servo Drive User Manual SERCOS II
9
[ Chapter 1 ]
• Supported commands:
– S-0-0099 Reset state class 1
– S-0-0127 Prepare switch to phase 3
– S-0-0128 Prepare switch to phase 4
– S-0-0148 Drive-controlled homing
– S-0-0152 “Position spindle” command
– S-0-0170 “Touchprobe” command
– S-0-0262 “Parameter initialization to defaults“ command
– S-0-0263 “Parameter initialization to backup values“ command
– S-0-0264 „Save current parameter values” command
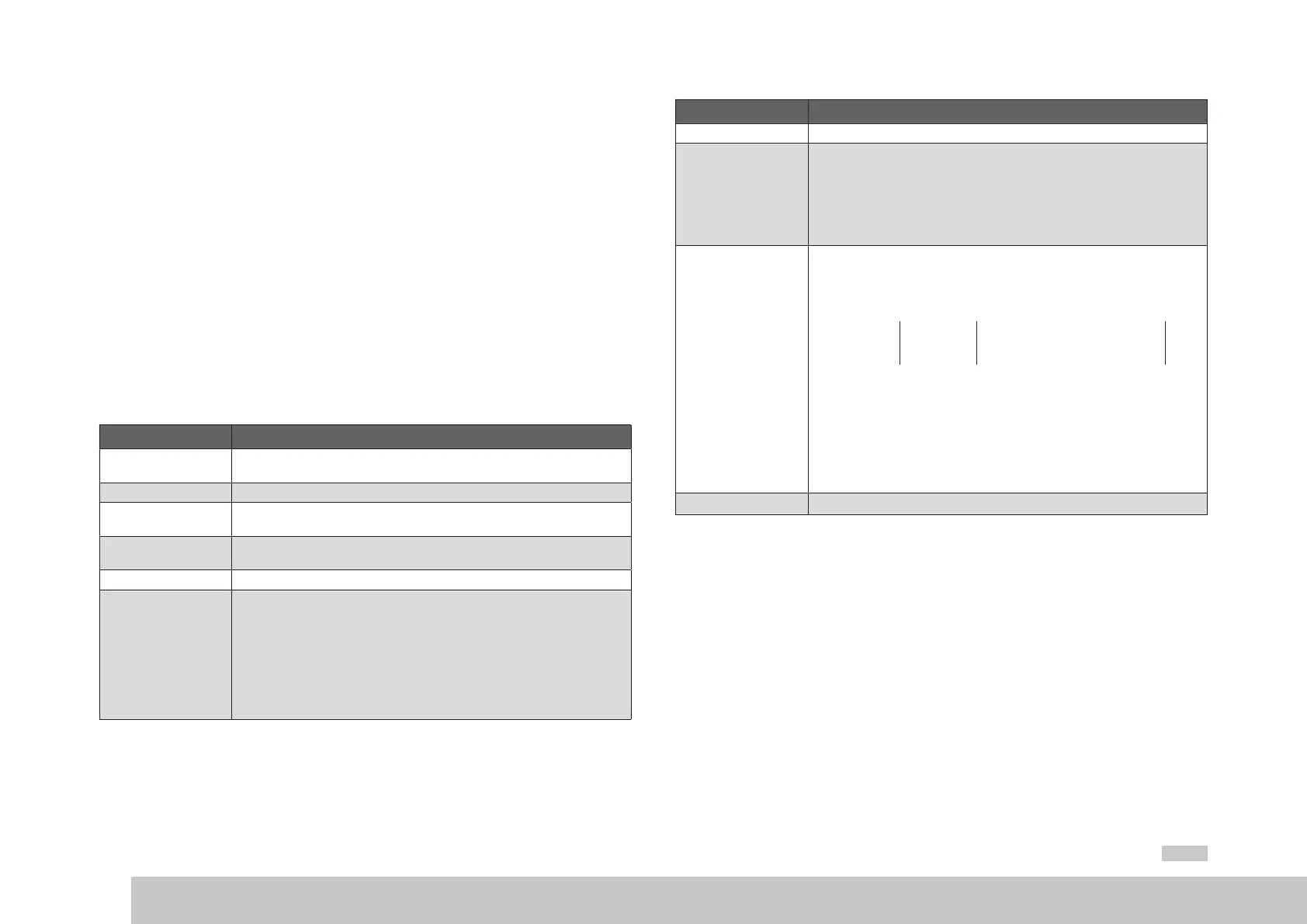
1.5 Terms
Term Explanation
SERCOS Standardized method of real-time communication between master control
systems and drives to DIN/EN 61491
OF Optical fibre
MST Master Sync Telegram. Provides ìs-precise data synchronization of the drives in
the fibre-optic loop by the time-slot method
MDT Master Data Telegram. Data from master to the drives in the fibre-optic loop
(control word, setpoints)
DT Drive Telegram. Data from drive to master (status, actual values)
Phase 0..4 SERCOS communication phases
0 = Fibre-optic loop closed by master (reception from MST) )
1 = Master identifies all slaves/drives in the loop
2 = Parameter-setting mode; as from phase 2 the service channel is in operation
3 = Time slots are maintained, cyclic data still invalid
4 = Cyclic operation mode; import of setpoints; transmission of actual values
Table 1.2 Terms
Term Explanation
Cyclic data Time-synchronized transfer of MDT, DT as from phase 3, valid as from phase 4
Service channel Subsidiary protocol in the telegrams.
Parameter values, attributes, scaling and names can be sequentially transferred.
Transfers can also be effected in parallel with the time-critical cyclic data
(MDT, DT) in phases 3 and 4.
The service channel provides services for operation mode recording, param-
eter setting, configuration and diagnosis
IDN Ident Number. S-x-yyyy or P-x-yyyy. 16 bits are available to represent
a SERCOS ident number.
Structure of IDN
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
S/P = 0/1 x = 0..7 yyy = 0..4095
S = SERCOS profile specific parameter (bit 15 = 0) )
P = SERCOS manufacturer specific parameter (bit 15 = 1)
x = Record number 0..7 (bits 14:12)
yyy = Data block number 0..4095 (bits 11:0)
Note: Only record 0 is supported in the drive.
Table 1.2 Terms