moog
MSD Servo Drive User Manual SERCOS II
43
[ Chapter 7 ]
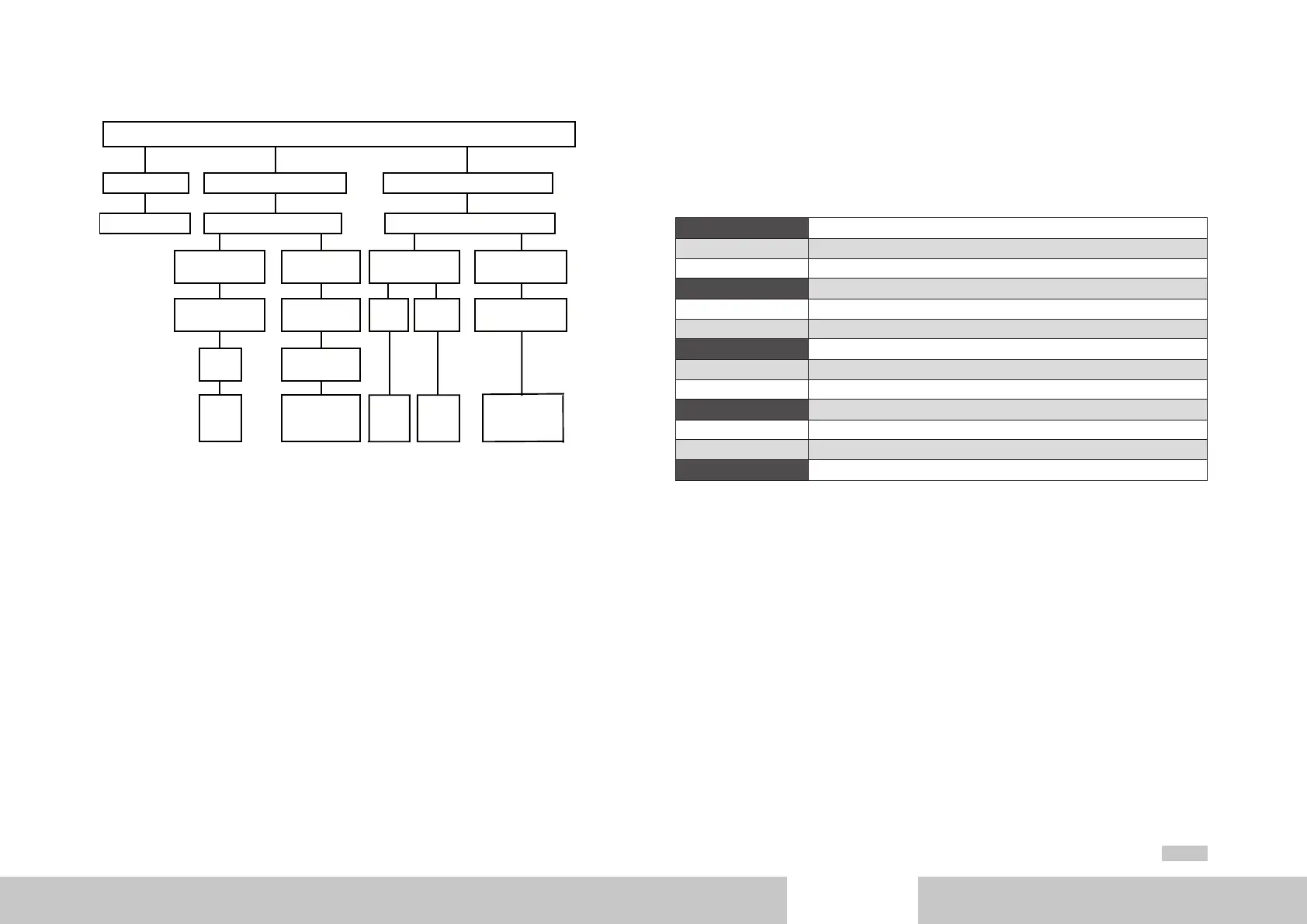
The following diagram shows the various velocity weighting options.
Figure 7.2
Weighting method, velocity data (S-0-0044)
None
Translatory
Rotary
Load or motor
Load or motor Load or motor
Preferential
weighting
Preferential
weighting
Parameter
weighting
Parameter
weighting
min
min or s
min s
min or s
Metre
Metre
LSB=
10
-6
m/min
LSB
variable
(S-0-0045)
(S-0-0046)
LSB =
10
-4
min
LSB
variable
(S-0-0045)
(S-0-0046)
LSB =
10
-6
s
S-0-0044 bit 0 – 2
S-0-0044 bit 6
S-0-0044
bit 3
S-0-0044
bit 5
S-0-0044
bit 4
–1
–1
Diagram of velocity weighting methods
7.2.3 Velocity polarity
In parameter S-0-0043 the polarities (preceding signs) of the specified velocity data
can be inverted according to the application. The polarities are not inverted within a
controlled system, but outside of it (at the input and output). A positive velocity setpoint
difference with non-inverted polarity means the direction of rotation is clockwise, look-
ing at the motor shaft.
Bit 0
Velocity setpoint
0 Not inverted
1 Inverted
Bit 1
Additive velocity setpoint
0 Not inverted
1 Inverted
Bit 2
Actual velocity 1
0 Not inverted
1 Inverted
Bit 3
Actual velocity 2
0 Not inverted
1 Inverted
Bit 4 -15
Reserved
Table 7.11 Setting of velocity polarity via parameter S-0-0043