moog
MSD Servo Drive User Manual SERCOS II
46
7.4.3 Weighting of torque data
The weighting of torque data is set via parameter S-0-0086. The significance of the LSB
of the torque data is defined by the following equation:
LSBsignicance=Unit•S-0-0093•10
S-0-0094
When preferential torque weighting is selected, the weighting as per the following table
applies.
Weighting method
(from S-0-0086)
Unit
(fromS-0-0086)
Weighting
factor (S-0-0093)
Weighting
exponent (S-0-0094)
Preferential
weighting
Rotary Nm 1 -2 0.01 Nm
Table 7.18 Preferential weighting of force data
Bit 2-0
Weighting method
0 0 0 No weighting
0 0 1 Translatory weighting
0 1 0 Rotary weighting
Bit 3
Weighting method
0 Preferential weighting
1 Parameter weighting
Bit 4
Distance unit
0 Nm (for rotary weighting) / N (for translatory weighting)
1 In lbf (for rotary weighting) / lbf (for translatory weighting)
Bit 5
Reserved
Bit 6
Data source
0 On the motor shaft
1 On the load side
Bit 7-17
Reserved
Table 7.19 Bit fields in the torque/force data weighting method parameter (S-0-0086)
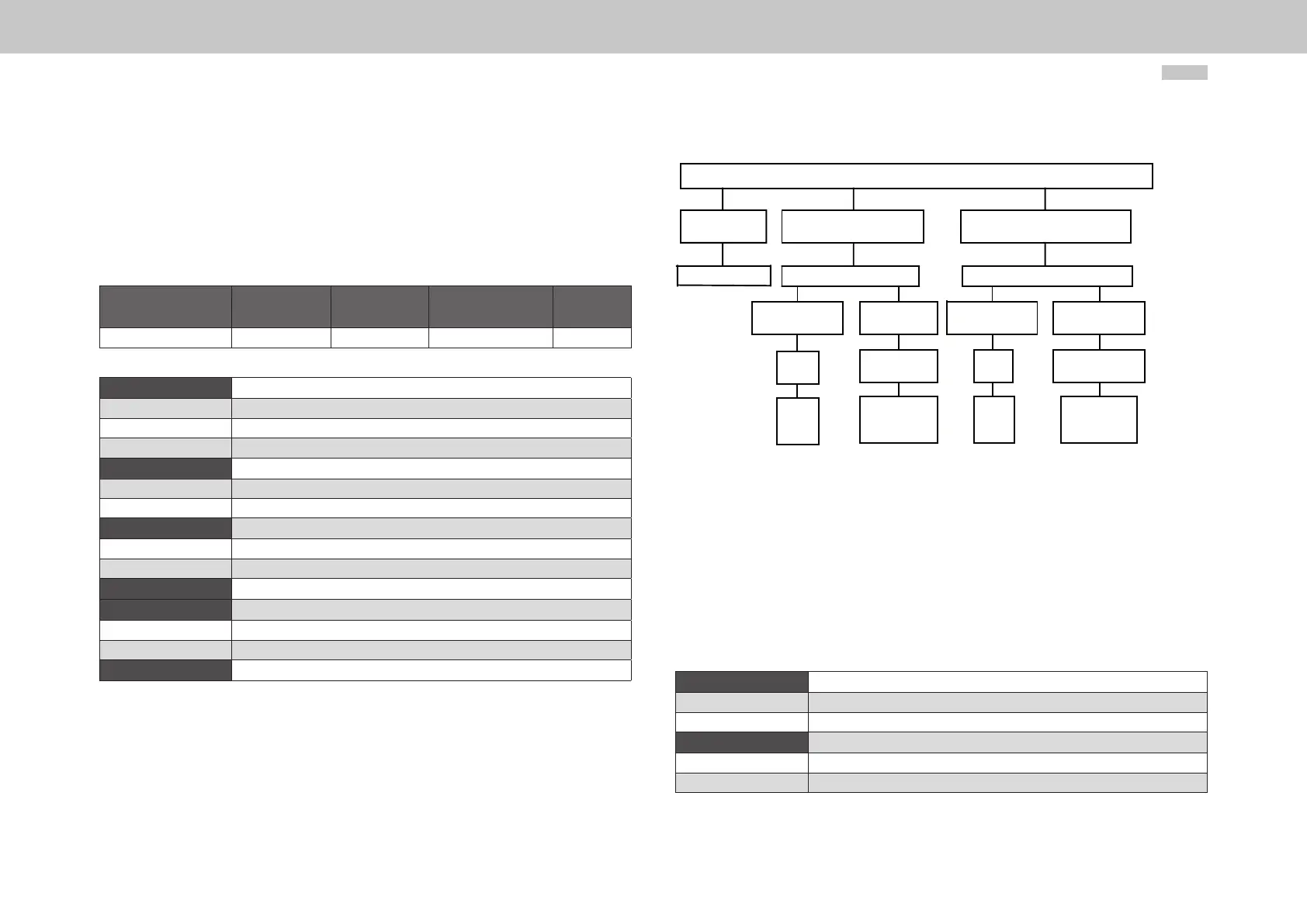
The following diagram shows the various torque/force weighting options.
Figure 7.4
Weighting method, force/torque (S-0-0086)
Percentage
Translatory (force)
Rotary
(torque)
Load or motor Load or motor
Load or motor
Parameter
weighting
Preferential
weighting
Preferential
weighting
Parameter
weighting
Nm
Nm
N
N
LSB =
1,0
N
LSB
variable
(S-0-0093)
(S-0-0094)
LSB =
10
-2
Nm
LSB
variable
S-0-0086 bit 0 – 2
S-0-0086 bit 6
S-0-0086
bit 3
S-0-0086
bit 4
(0,1 %)
(S-0-0093)
(S-0-0094)
Diagram of torque/force weighting methods
7.4.4 Torque polarity
IIn parameter S-0-0085 the polarities (preceding signs) of the specified torque data
can be inverted according to the application. The polarities are not inverted within a
controlled system, but outside of it (at the input and output). A positive torque setpoint
difference with non-inverted polarity means the direction of rotation is clockwise, look-
ing at the motor shaft.
Bit 0
Torque reference
0 Not inverted
1 Inverted
Bit 1
Additive torque setpoint
0 Not inverted
1 Inverted
Table 7.20 Setting of velocity polarity via parameter S-0-0043