90 DE
hyperion - GEBRAUCHSANWEISUNGEN
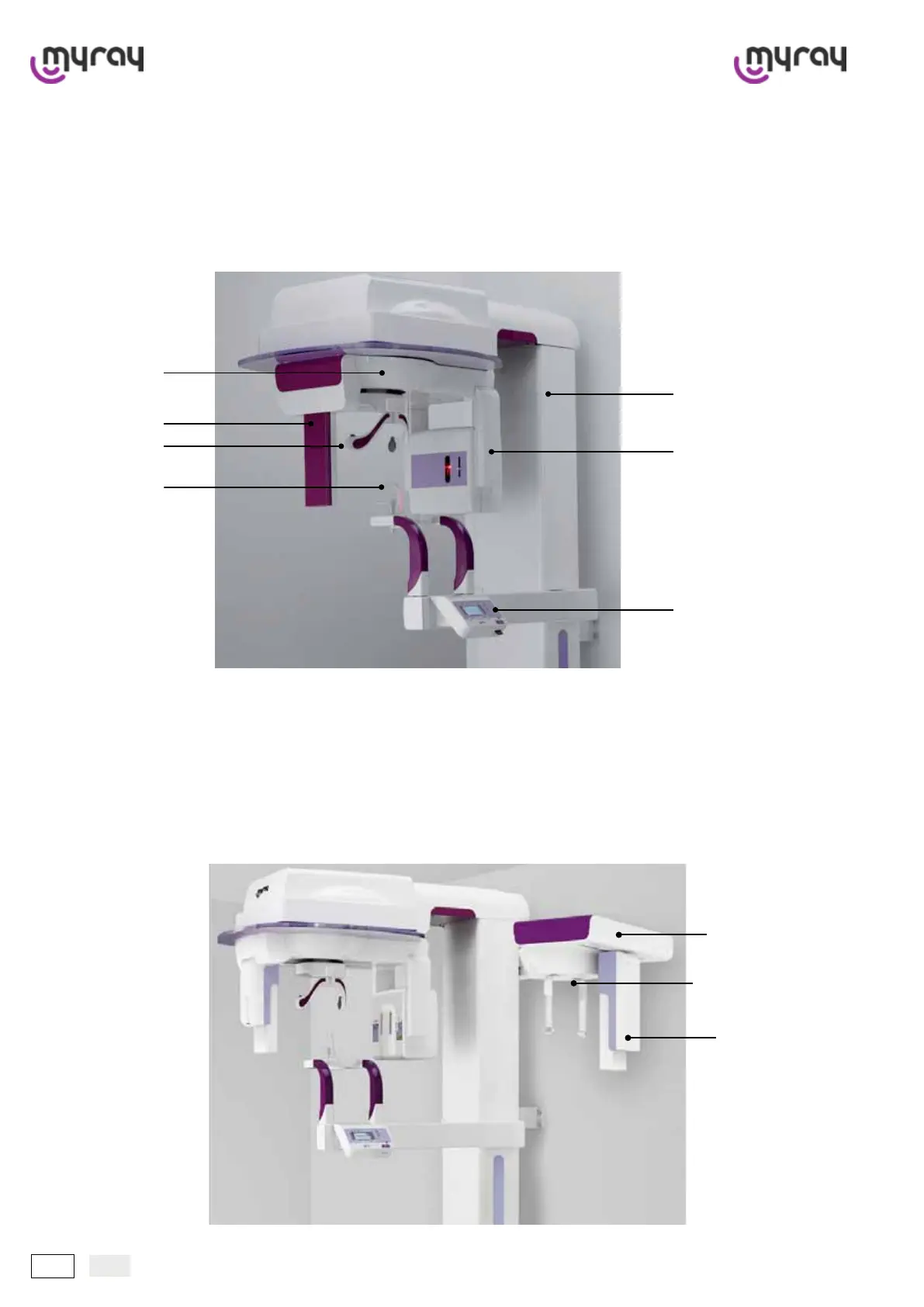
3 BESCHREIBUNG DES GERÄTS
hyperion besteht aus einem Rotationsarm, der mit einer Tragsäule verbunden ist. Mit dem Rotationsarm lassen sich
motorbetriebene rotatorische und translatorische Bewegungen durchführen, die zum Bewegen des Röntgenemis-
sionssystems und des Bilddetektors rund um den Patienten unter Einhaltung komplexer Bahnen dienen, die dem
morphologischen Prol folgen. Der Rotationsarm ist an einer Tragsäule angebracht, die durch ein motorbetriebenes
Bewegungssystem vertikal verstellt werden kann. Die Abbildungen zeigen hyperion in der Ruheposition.
Das Modell hyperion MRT verfügt über einen xen CCD-Bildsensor; es ist nur in dieser Konguration verfügbar.
Arm für
Panoramaaufnahme
Bild-sensor
Cephalostat
Braccio rotante
Sensore CCD
Supporto tempie
Morso parziale
Colonna
Generatore raggi
Pannello di controllo
Das hyperion kann dagegen für eine Panoramaaufnahme mit einem Arm ausgestattet werden, der auf der Halterung
an der Säule eingesetzt wird. Der Arm hat eine Kephalostaten, um den Patienten in Position während der Untersu-
chung zu halten und Imaging-Detektor, der bewegt sich synchron mit der Bewegung der Röntgenquelle.
Ein Benutzer die Wahl, kann das hyperion-Einheiten mit einer einzigen bildgebenden Detektor oder von zwei getrenn-
ten Detektoren Bilder (die bleiben xiert, auf einer rotierenden (der Betreiber muss es auf dem Dreharm für Panorama-
Prüfungen oder auf teleradiographyc Arm für Prüfungen CEPH Ort) ausgestattet werden Arm und den anderen auf den
Arm zu Panoramaaufnahme).
Rotationsarm
CCD-Sensor
Schläfenhalter
Aufbissteil
Säule
Röntgenstrahl-
generator
Bedientafel