FPΣ
6.4 Pulse Output Function
6-39
(*1): Control code (H constant)
Operation mode and output method
00: Incremental CW/CCW
02: Incremental PLS + SIGN (forward off / reverse on)
03: Incremental PLS + SIGN (forward on / reverse off)
10: Absolute CW/CCW
12: Absolute PLS + SIGN (forward off / reverse on)
13: Absolute PLS + SIGN (forward on / reverse off)
H jjjjjjjj
0: Fixed
Operation connection mode(*4)
0: Stop
1: Continue
Rotation direction (*5)
0: Clockwise direction (Right rotation)
1: Counterclockwise direction (Left rotation)
Circular shape method (*6)
0: Pass position setting method
1: Center position setting method
S+1 S
(*2): Composite speed (Frequency) “K constant”
100 Hz to 20 kHz [K100 to K20000]
(*3): Target position and pass position
K-8388608 to K8388607
(*4): Operation connection mode
Stop:
When stop (0) is specified, it will stop when the target position is reached.
Continue:
When the following circular interpolation data table is overwritten when continue (1) is specified
after circular interpolation action begins, the following circular interpolation begins when the first
circular interpolation that was started up finishes (target position reached). To finish, specify stop (0)
for this flag (operation connection mode) after the last circular interpolation action has started.
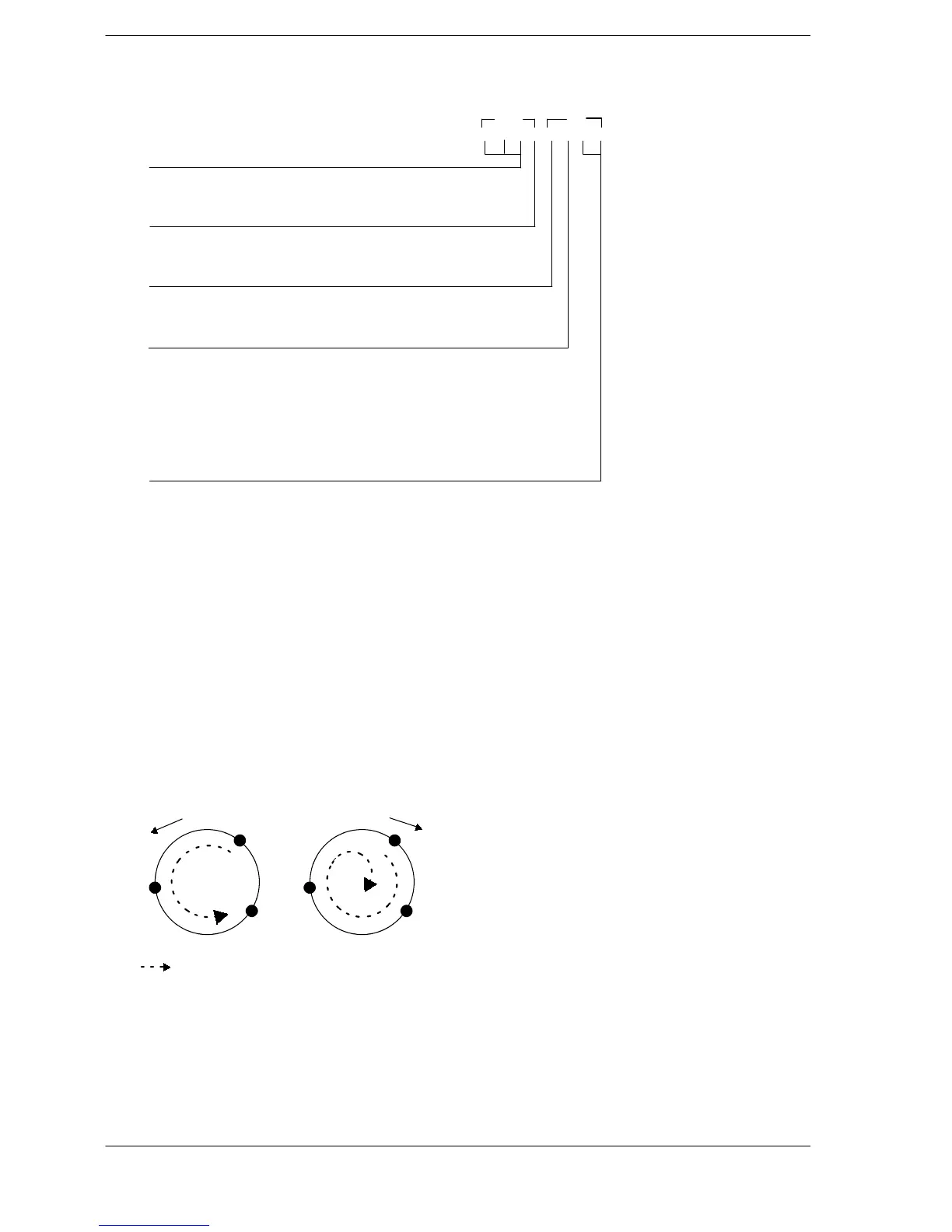
(*5): Rotation direction
Pulses are output according to the designated direction. Operation differs, as indicated below,
depending on the pass position and rotation direction setting.
Clockwise direction
(Right rotation)
S: Current position P: Pass position E: Target position
Counterclockwise direction
(Left rotation)
Operation due to calculation result
P
S
E
P
S
E
(*6): Circular shape method
Pass position setting method:
The center position and the radius of the circular are calculated by specifying the pass and target
positions for the current position.
Center position setting method:
The radius of the circular is calculated by specifying the center and target positions for the current
position.

 Loading...
Loading...

