FPΣ
6.4 Pulse Output Function
6-51
R903A
R40
R42
DF
XA R40
R903A
R42
T0 R42
DF/
R40
DF
R40 R41
R41
X3
DF
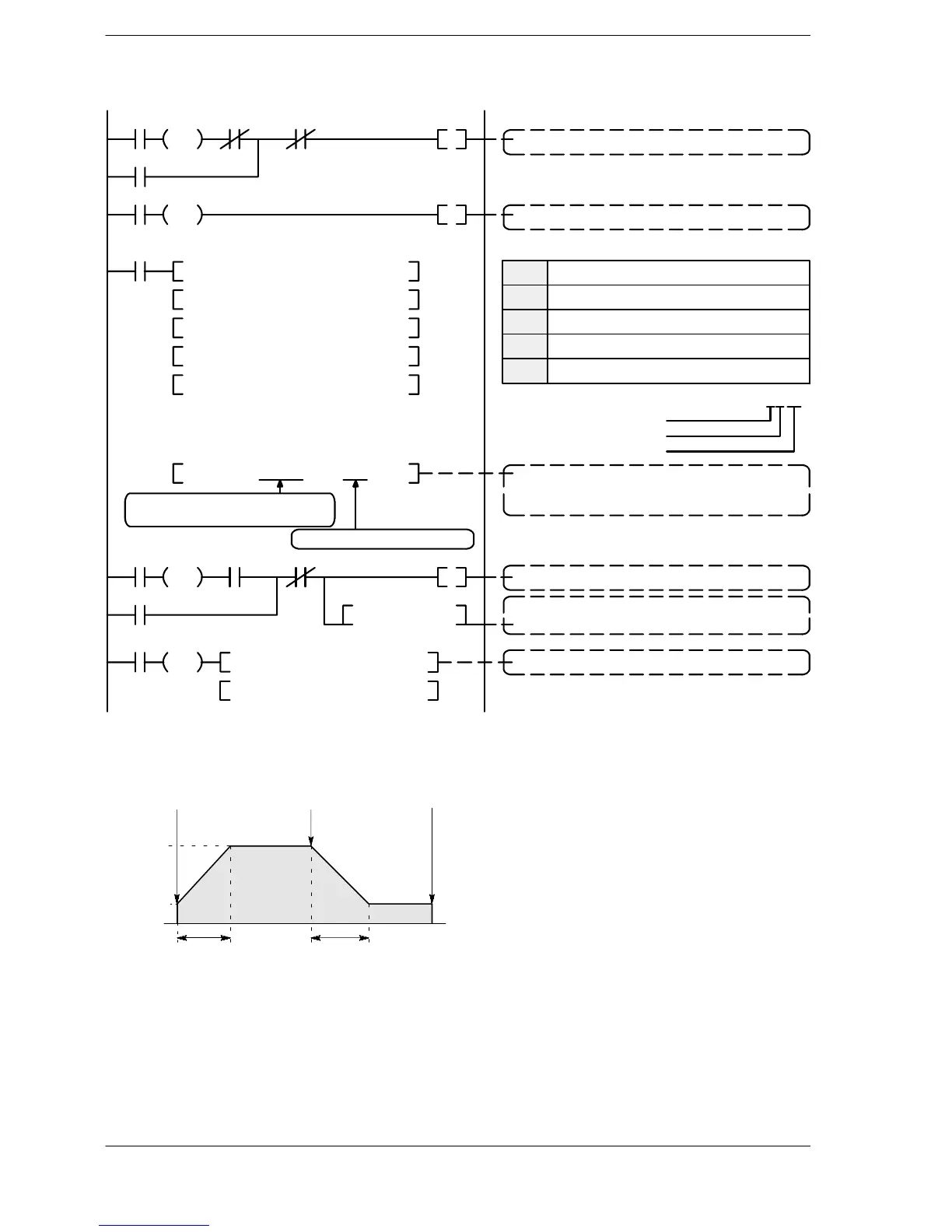
The data table headed by DT200
is used.
Pulses are output from CH0.
F1 DMV H 1121 ,DT 200
F1 DMV K 100 ,DT 202
F1 DMV K 2000 ,DT 204
F1 DMV K 150 ,DT 206
F1 DMV K 0 ,DT 208
F171 SPDH DT 200 ,K 0
TMX 0, K 10
F0 MV H 10 ,DT 90052
F0 MV H 0 ,DT 90052
Positioning operation running
Positioning operation start
Positioning data table
DT200
DT201
DT202
DT203
DT204
DT205
DT206
DT207
DT208
DT209
Control code *: H 1121
Initial speed: 100 Hz
Maximum speed: 2,000 Hz
Acceleration time: 150 msec
Deviation counter clear output: Not used
H11
Duty 1/4 (25%)
48 Hz to 100 kHz
Home return CCW
* Control code
Pulse output instruction (table-shaped control)
The data table headed by DT200 is used and
pulses are output from CH0.
Positioning done pulse (1 s)
0.1 s type timer
Setting K10 and using it as a 1-second timer
Near home deceleration start
Program
21
Figure 116: FPΣ Sample program - home return operation (program)
XA: on
Pulse output diagram
150 ms 150 ms
2,000Hz
100 Hz
0Hz
Proximity sensor
X3: on
Home sensor
X2: on
Figure 117: FPΣ Sample program - home return operation (pulse output diagram)

 Loading...
Loading...

