SM-Applications Modules & Motion Processors User Guide 51
Issue Number: 4
Safety
Information
Introduction Installation
Getting
Started
Parameters
DPL
Programming
Communications
Freeze and
Marker
CTSync
Inter-option
Synchronization
Diagnostics
Migration
Guide
Quick
Reference
Index
Contains the feedback encoder revolution count.
Contains the reference encoder position.
The top 16-bits are scaled to 65536 counts per rev regardless of the type of feedback
device or scaling configured in the drive. The lower 16-bits give the fine position as
available from the feedback device scaled to 65536. For standard encoders this will
typically be zero, but for higher precision devices such as SinCos encoders, this extra
precision will be available.
Marker pulses, etc. have no influence on this parameter.
Contains the reference encoder revolution count.
Provides a definitive method of identifying the mode the drive is in. It is recommended
that this parameter is used instead of Pr
11.31 or Pr 00.48 since those parameters
indicate the requested, not the actual mode.
The values are defined as follows.
In order to programmatically change the drive mode, use the MODEXFER or
CMODEXFER function blocks.
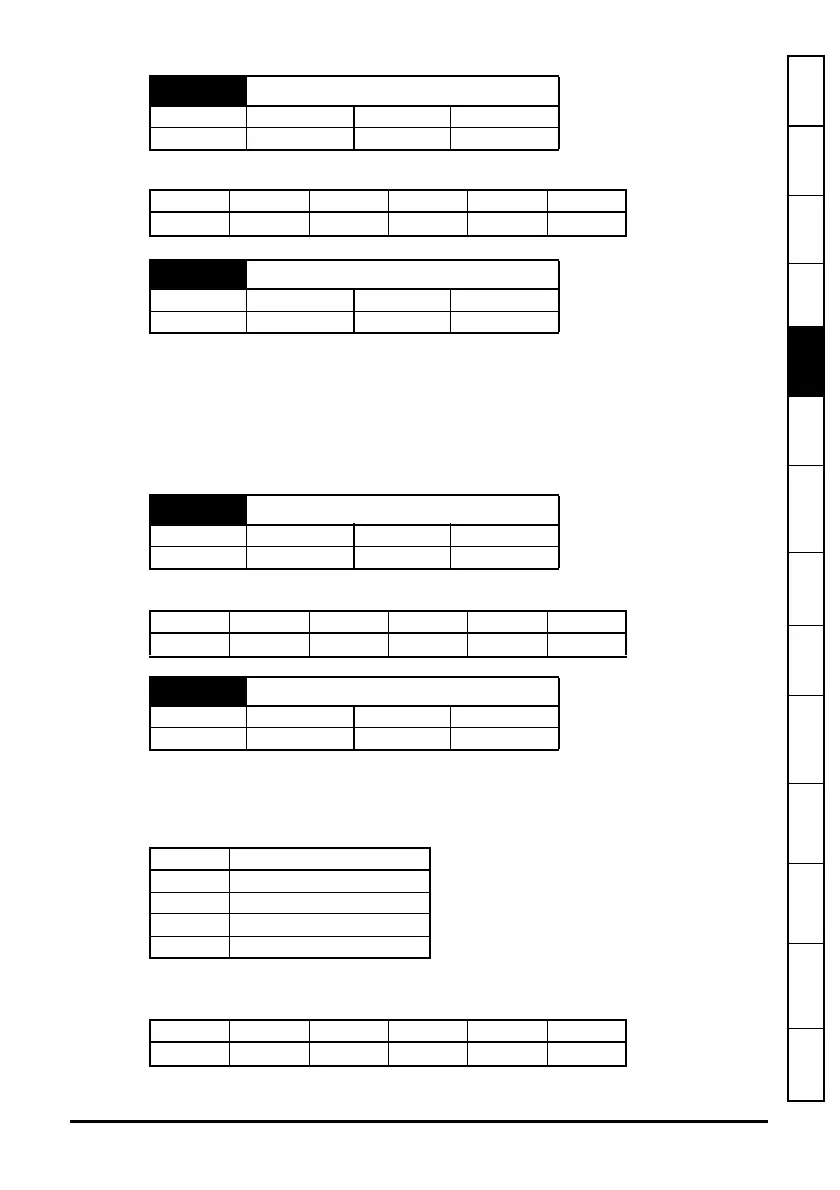
Pr 90.02 Feedback Encoder Revolution Count
Access RO Range Unsigned 16-bit
Default N/A Update Rate See Pr 81.16
Apps Apps Lite Apps Plus Lite V2 ST Plus ST Indexer
Pr 90.03 Reference Encoder Position (2
32
/rev)
Access RO Range Signed 32-bit
Default N/A Update Rate See Pr 81.16
Pr 90.04 Reference Encoder Revolution Count
Access RO Range Unsigned 16-bit
Default N/A Update Rate See Pr 81.16
Apps Apps Lite Apps Plus Lite V2 ST Plus ST Indexer
Pr 90.10 Drive Mode
Access RO Range Signed 16-bit
Default N/A Update Rate Immediate
Value Mode
26 Open-loop
27 Closed-loop vector
28 Servo
29 Regen
Apps Apps Lite Apps Plus Lite V2 ST Plus ST Indexer
 Loading...
Loading...