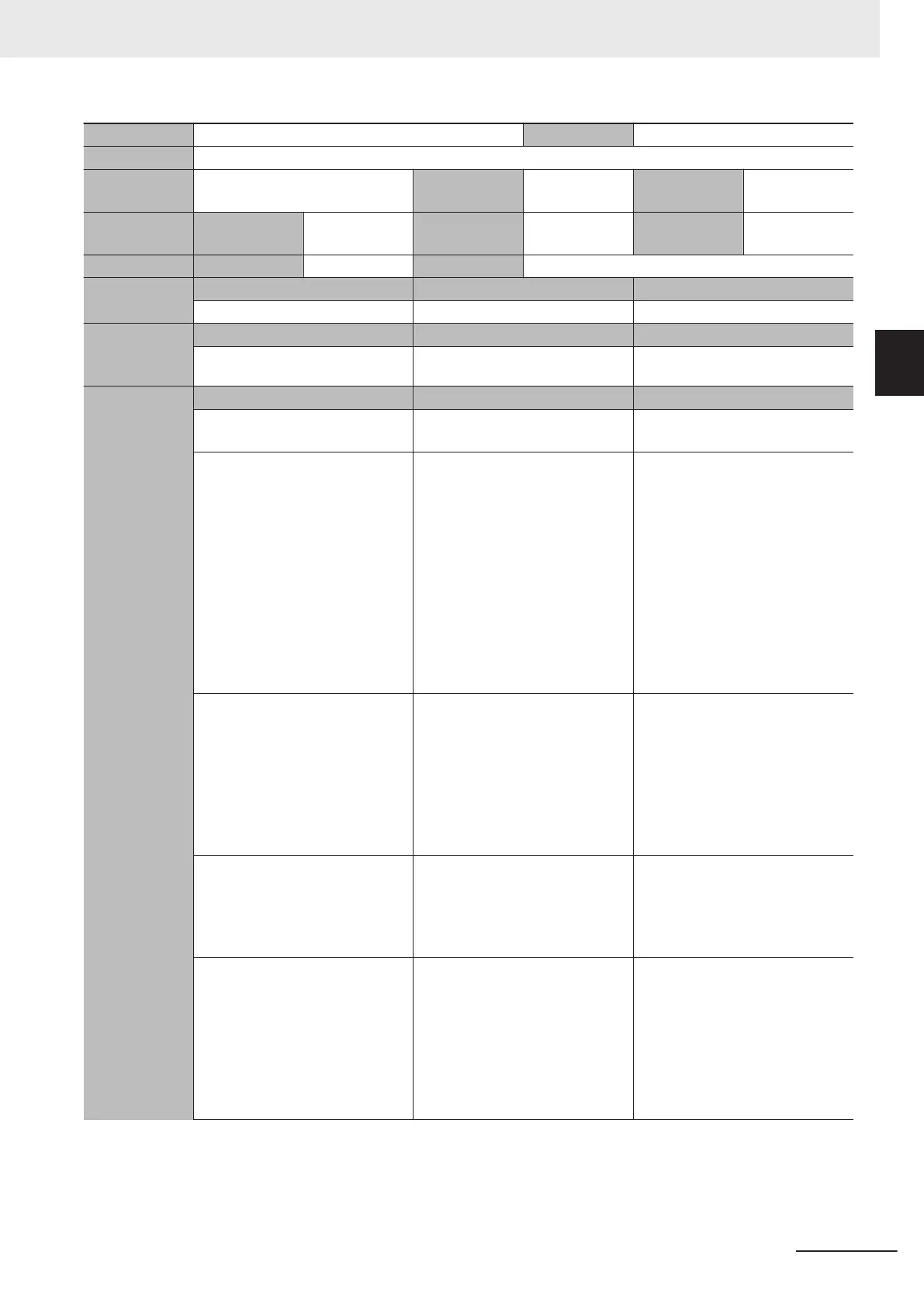
Event name Excessive Position Deviation Error Event code 38A70000 hex
Meaning Position deviation became excessive when position control is active.
Source EtherCAT Master Function Mod-
ule
Source details Slave Detection tim-
ing
Continuously
Error attrib-
utes
Level Minor fault Recovery Error reset Log category System log
Effects User program Continues. Operation Motor stops.
Indicators EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System-de-
fined varia-
bles
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
(1) Encoder disconnection Check if the encoder is discon-
nected.
None
(2) The encoder rotation direc-
tion, motor rotation direction in
wiring phase sequence, or inver-
ter output wiring phase sequence
mismatched.
Review the connections and set-
tings so that the rotation direction
is the same for all devices.
Review the set values of
T
erminal [PIA][PIB] Pulse input
format
(3014-0F hex), Terminal
[PIA][PIB] Encoder pulse
resolution (3014-10 hex),
Terminal [PIA][PIB] Pulse
scaling factor 1 (3014-11 hex),
and Terminal [PIA][PIB] Pulse
scaling factor 2 (3014-12 hex).
Make connections and settings
so that the rotation direction is
the same.
(3) Set value for excessive devia-
tion is too small.
Review the set values of
Detection level of excessive
positioning deviation upper 4
digits (3037-18 hex) and
Detection level of excessive
positioning deviation lower 4
digits (3037-19 hex).
Increase the set values if low.
Set
Detection level of
excessive positioning
deviation upper 4 digits
(3037-18 hex) and Detection
level of excessive positioning
deviation lower 4 digits
(3037-19 hex) appropriately.
(4) The position control gain is
too small.
Review the set values of
Position control Gain (3037-04
hex) and Position control Gain
2 (3037-05 hex).
Increase the set values if low.
Set
Position control Gain
(3037-04 hex) and Position
control Gain 2 (3037-05 hex)
appropriately.
(5) The speed control gain is too
small.
Review the set values of Speed
control 1 P Gain (3014-04 hex),
Speed control 2 P Gain
(3009-2E hex), Speed control 3
P Gain (3013-2E hex), and
Speed control 4 P Gain
(300C-2E hex).
Increase the set values if low.
Set
Speed control 1 P Gain
(3014-04 hex), Speed control 2
P Gain (3009-2E hex), Speed
control 3 P Gain (3013-2E hex),
and Speed control 4 P Gain
(300C-2E hex) appropriately.
Appendices
A-271
M1 Series EtherCAT Type User’s Manual (I670)
A-5 Sysmac Error Status Codes
A
A-5-2 Error Descriptions
 Loading...
Loading...


