Section 8 Setting data
8-18
Setting data
•
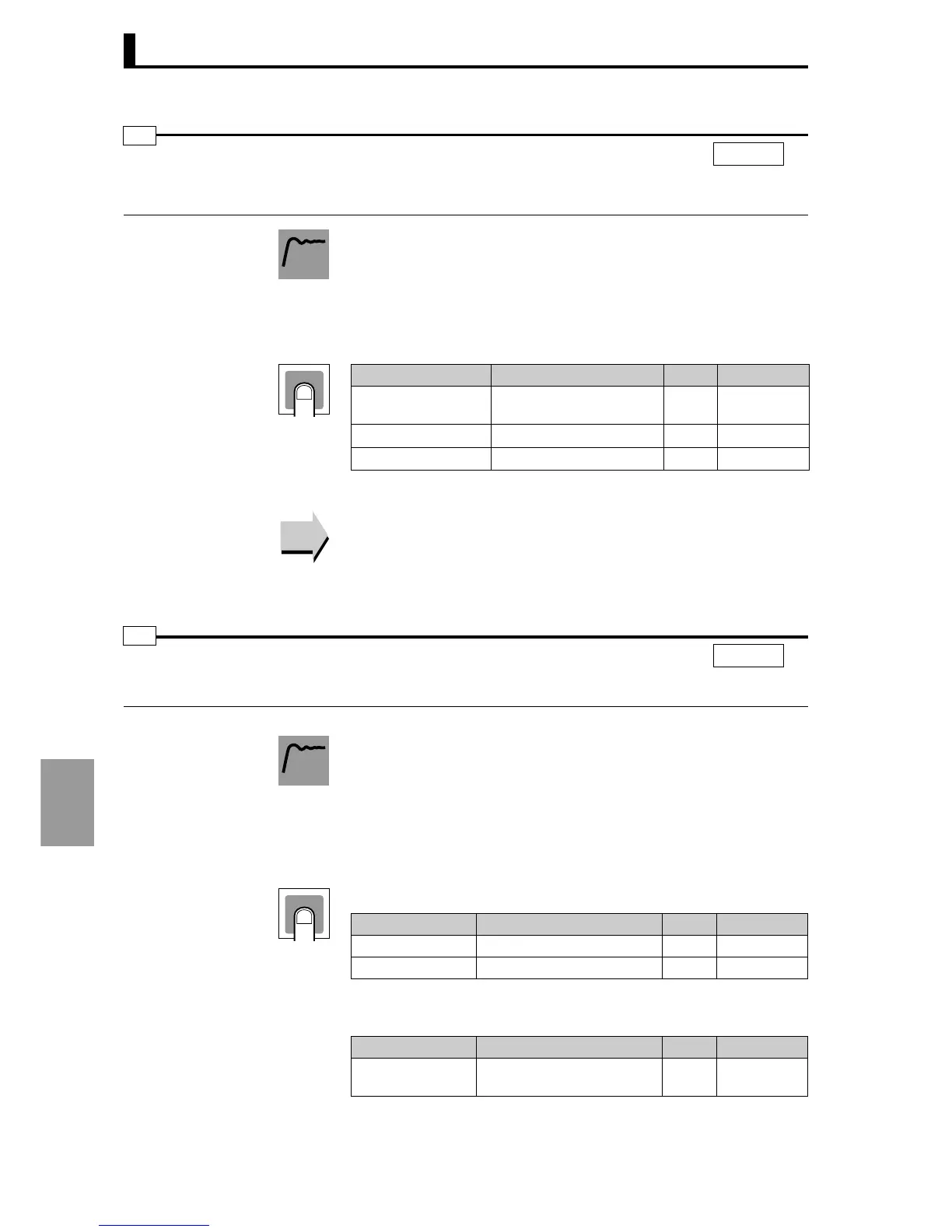
This specifies the change rate during SP ramp. The maximum allowed
change per unit of time is set as the "SP ramp rise value" and "SP ramp
fall value". When these are set to "0", the SP ramp function is disabled.
• The decimal point position of the SP ramp rise and fall values is
determined by the selected sensor during temperature input, and by
the scaling during analog input.
*1 Depends on the SP ramp time unit setting. (The initial setting is EU/min.)
● Related setting data
"Input
∗type" (Input initial setting level) (P.8-36)
"Scaling input value 1", "Scaling display value 1","Scaling input value
2", "Scaling display value 2", "Decimal point position" (Input initial
setting level) (P.8-37)
• On a standard type, "Manipulated variable at stop" is set to the MV
when operation is stopped. On a position proportional controll type,
"MV at stop" is set to the position when operation is stopped
(Completely open/Hold/Completely closed).
• On a standard type, "MV at PV error" is set to the MV when an error
occurs. On a position proportional control type, "MV at stop" is set to
the position when an error occurs (Completely open/Hold/
Completely closed).
• Standard type
A negative value is set for the cooling MV for heating/cooling control.
• Position proportional control type
SP ramp time unit
SP ramp rise value
SP ramp fall value
spru
sprh
sprl
CH
l.adj
Function
Setting
Setting data Setting range Units
Default value
SP ramp time unit
s: EU/sec, m: EU/min,
h: EU/hour
− EU/min
SP ramp rise value 0 to 99999(0: OFF)
*1
0: OFF
SP ramp fall value 0 to 99999(0: OFF) *1 0: OFF
Reference
Reference
MV at stop
MV at PV error
mv-s
mv-e
CH
l.adj
Function
Setting
Control method Setting range Units
Default value
Standard -5.0 to 105.0 % 0.0
Heating/Cooling -105.0 to 105.0 % 0.0
Control method Setting range Units
Default value
Position
proportional
-1: Completely closed, 0:
Hold, 1: Completely open
− 0: Hold
 Loading...
Loading...






