6-21
6 Process Data Communications and SDO Communications
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
6-2 SDO Communications
6
6-2-2 Sample Programming
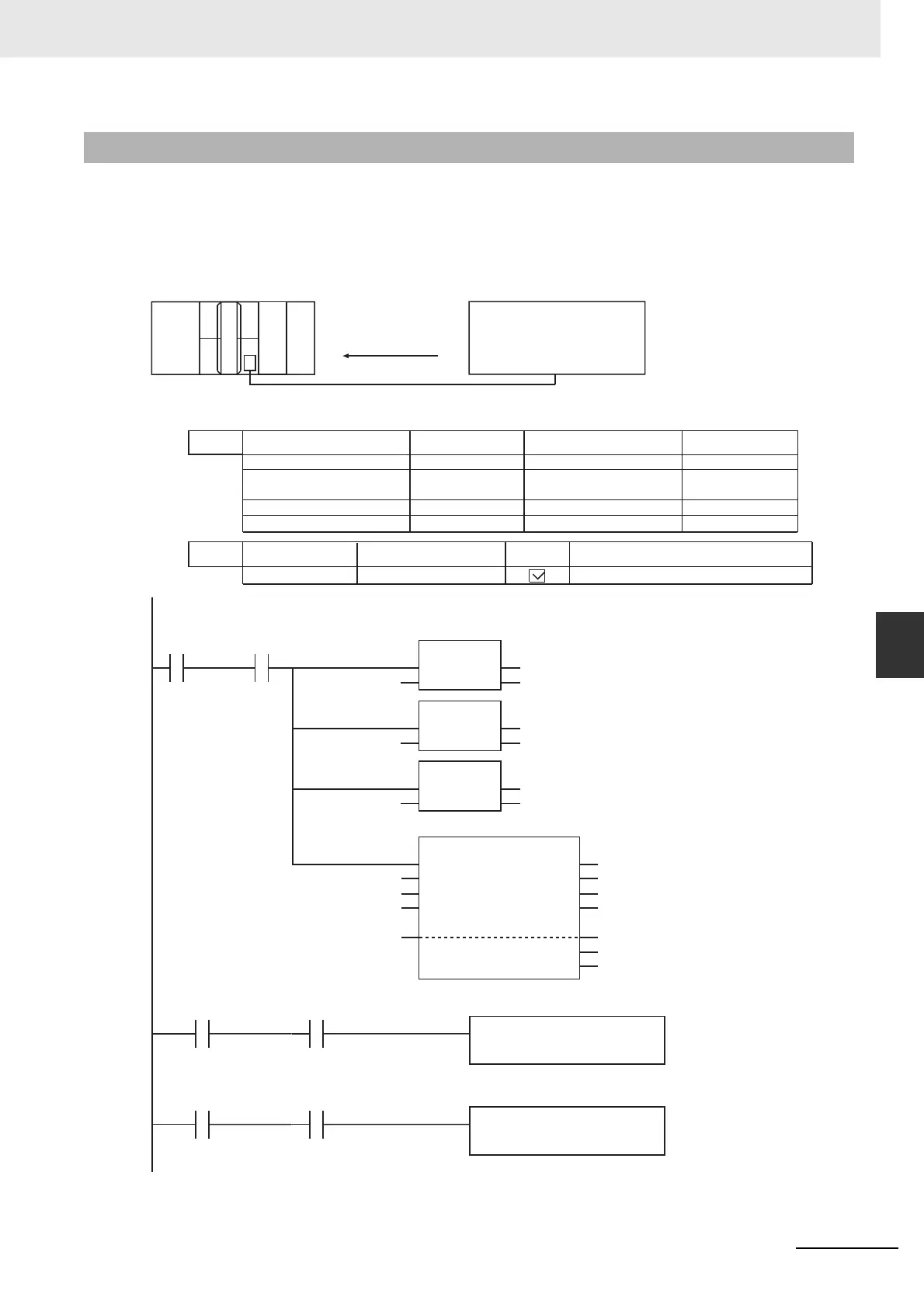
This sample uses an EtherCAT communications instruction to read the software version of an OMRON
R88D-KN01L-ECT Servo Drive. The node address of the slave is 1.
The object index for the software version is 16#100A. The subindex is 0. The read value is stored in
STRING variable VersionInfo.
6-2-2 Sample Programming
Built-in EtherCAT port
SDO read
Remote slave node address 1
Object Dictionary Settings
Index: 16#100A
Subindex 0
Execution condition
SDO parameter
Read data
Variable Data type Initial value Comment
LD
Trigger
SdoObject
VersionInfo
EC_CoESDORead_instance
False
(Index:=0, Subindex:=0,
IsCompleteAccess:=False)
‘’
BOOL
_sSDO_ACCESS
STRING[256]
EC_CoESDORead
Accept trigger.
Trigger
UINT#16#100A
SdoObject.Index
_EC_MBXSlavTbl[1]
Inline ST
Inline ST
Trigger
EC_CoESDORead_instance.Done
EC_CoESDORead_instance.Error
Processing after normal end
1 // Processing after normal end
2 ;
Trigger
Processing after error end
1 // Processing after error end
2 ;
(@)MOVE
EN ENO
In Out
USINT#0
UINT#1
UINT#20
SdoObject.Subindex
SdoObject
(@)MOVE
EN ENO
In Out
FALSE
VersionInfo
SdoObject.IsComleteAccess
(@)MOVE
EN ENO
In Out
EC_CoESDORead
Execute Done
NodeAdr Busy
SdoObj Error
TimeOut ErrorID
ReadDat
AbortCode
ReadSize
EC_CoESDORead_instance
_EC_MBXSlavTbl ARRAY[1..192] OF BOOL
Constant
Internal
Variables
External
Variables
tnemmoCepyt ataDelbairaV
Message Communications Enabled Slave Table

 Loading...
Loading...







