3 EtherCAT Communications
3-2
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
3-1 EtherCAT Communications Types
and Settings
The EtherCAT port built into the NJ/NX-series CPU Unit uses CoE (CAN application protocol over Eth-
erCAT) to exchange information with slaves over EtherCAT. CoE implements message communica-
tions of CAN application over an EtherCAT network. With CoE, the parameters and control information
held by the slaves are specified according to data specifications for the object dictionary.
There are two communications that are used to communicate data between the master and slaves.
These are described below.
Process Data Communications:
Communications using process data objects (PDOs) to exchange information in realtime with a fixed
period.
SDO Communications:
Communications using service data objects (SDOs) for communicating information when required.
[
The EtherCAT port built into the NJ/NX-series CPU Unit uses process data communications for com-
mands to refresh I/O data in a fixed control period, including I/O data for EtherCAT slaves, and position
control data for Servomotors. It uses SDO communications for commands to read and write data, such
as for parameter transfers, at specified times.
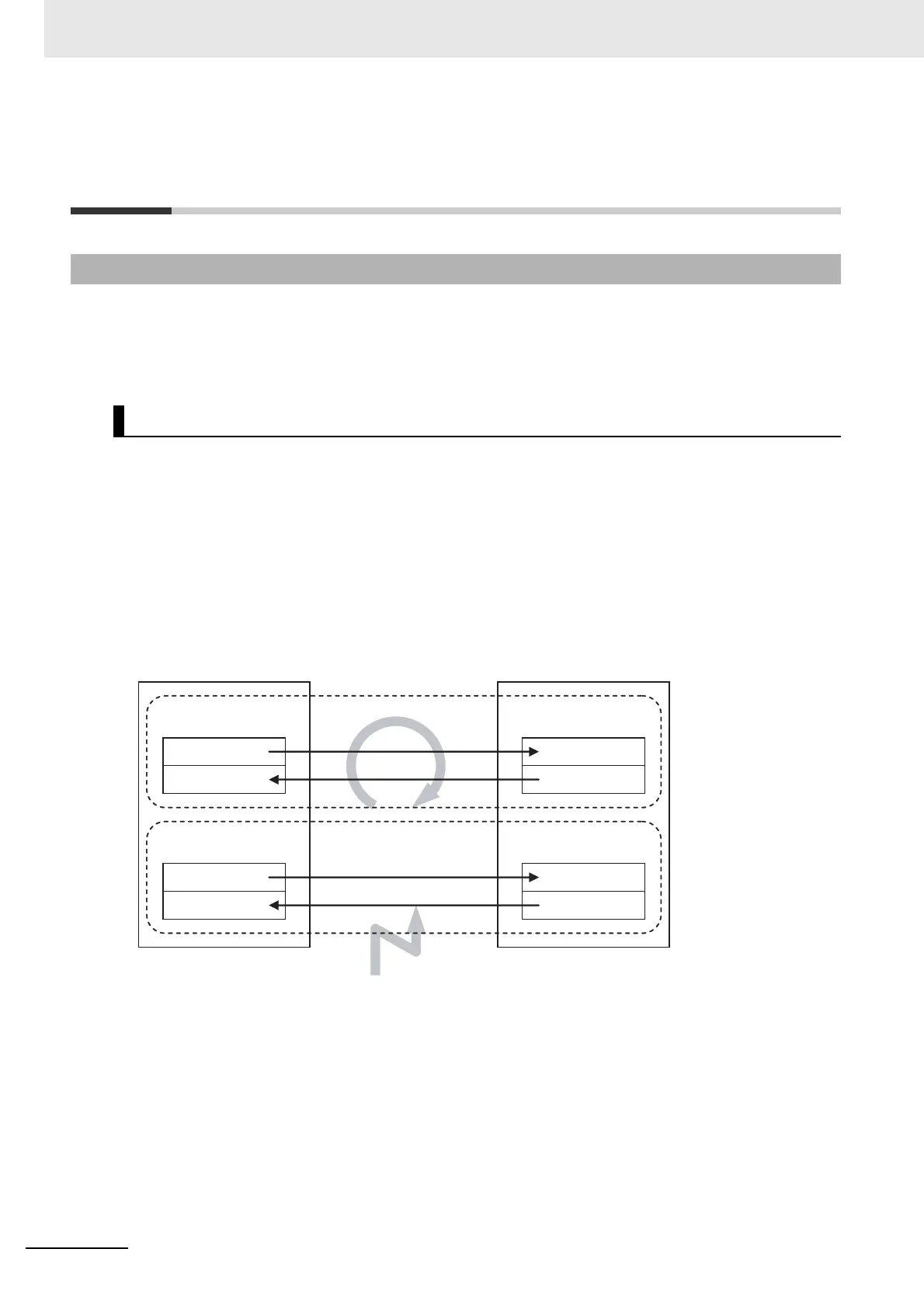
Process data communications are executed each control cycle to refresh data continuously, and SDO
communications are executed between PDO communications.
3-1-1 CoE (CAN Application Protocol over EtherCAT)
Process data Communications and SDO Communications
Controller
(communications master)
EtherCAT communications
line
Executed periodically.
Process data
communications
SDO communications
Data read.
Executed for requests.
Data written.
Input data
Output data
Slave

 Loading...
Loading...







