6 Process Data Communications and SDO Communications
6-12
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (W505)
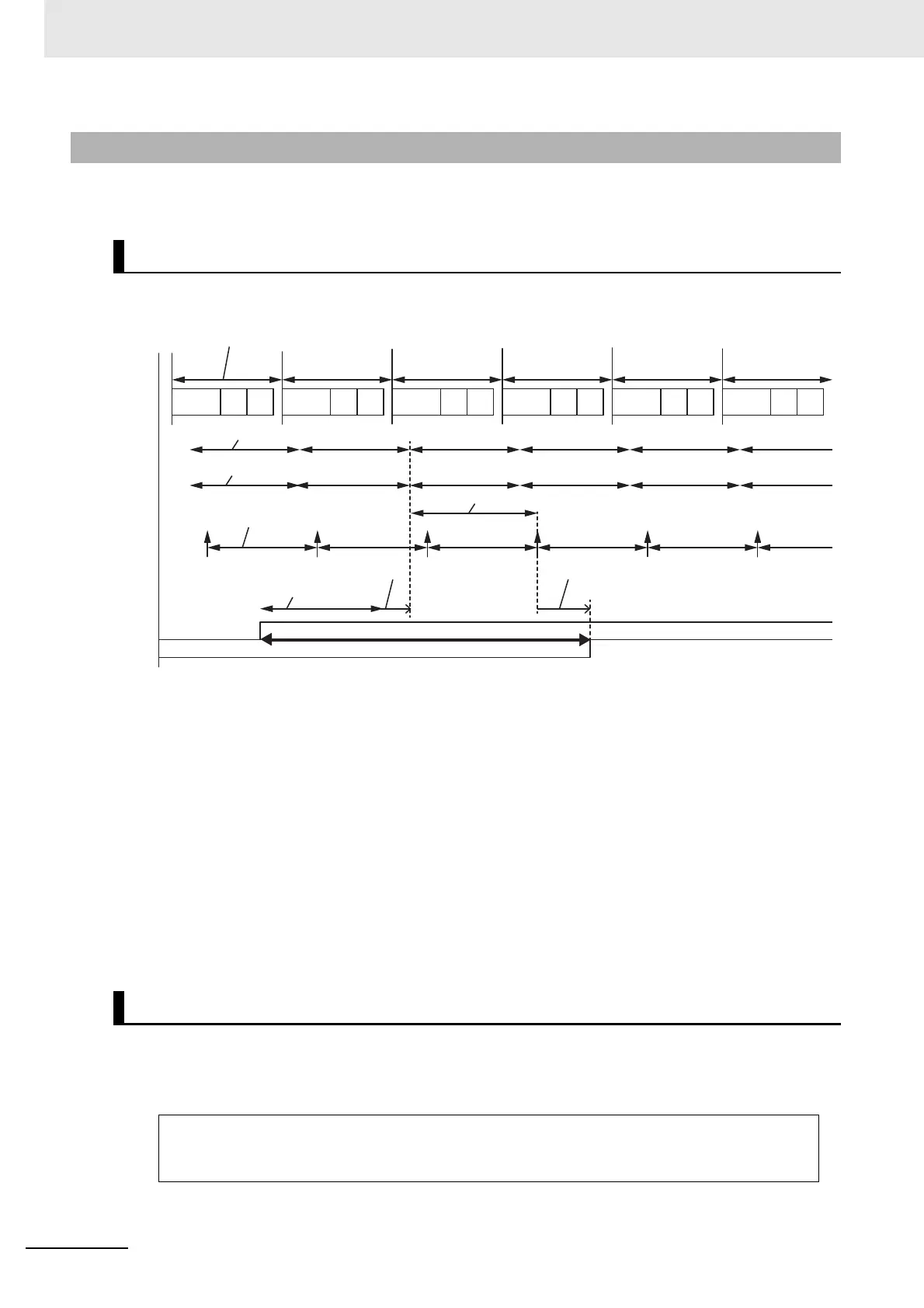
This section defines the maximum I/O response time of process data communications in the system.
The following timing chart shows when sequence control and motion control are performed within the
task period of the primary periodic task in which EtherCAT communications were refreshed.
(1) The slave generates process data send frames with I/O information from sensors and other
devices.
(2) The EtherCAT receives the process data frames that was sent from the slave through I/O
refreshing for the CPU Unit, and reads it as input data in the CPU Unit.
(3) Based on the input data, the CPU Unit processes user program execution and motion control to
determine the output data.
(4) The EtherCAT master generates a send frame of the process data with the output data pro-
duced in (3), and sends the frame to the slave before the slave performs reception processing.
(5) The slave receives the send frame of the process data from the EtherCAT master in the periodic
trigger timing, and outputs data to relays and other output devices.
The maximum I/O response time is calculated for each periodic task of the CPU Unit in which I/O is
refreshed for EtherCAT slaves.
The formula for calculating the maximum I/O response time is as follows:
6-1-4 System Response Time in Process Data Communications
Standard Synchronization Timing
Calculation Formula for Maximum I/O Response Time
Maximum I/O response
time =
Task period of periodic task (= process data communications cycle) × 2
+ Slave input response time + Slave output response time
+ Transmission delay + Transmission jitter
Input
CPU Unit
Network
Slave
Processing
OI
UP
RG
MC
Task period = Period of the primary periodic task
Output
Transmission cycle = Task period
Scheduled trigger = task period
Time lag = Task period
OI
UP
RG
MC OI
UP
RG
MC OI
UP
RG
MC OI
UP
RG
MC OI
UP
RG
MC
OI : I/O refresh
UPRG : User program execution
MC : Motion control
Slave output response time
Slave input response time
Maximum I/O response time
Task period
+
Transmission delay
+
Transmission jitter
Process data communications cycle = Task period
(1)
(2) (3) (4)
(5)
{
{

 Loading...
Loading...







