8-43
8-5 Interface Monitor Setting Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
Explanation of Set Values
Use this in combination with the Positioning Completion Range 1 (Pn431) to set the operation for
positioning completion output (INP: CN1 pin 39).
When Positioning Completion Hold Time (Pn433) is set to 0, hold time becomes infinite and ON
status is held until the next position command comes in.
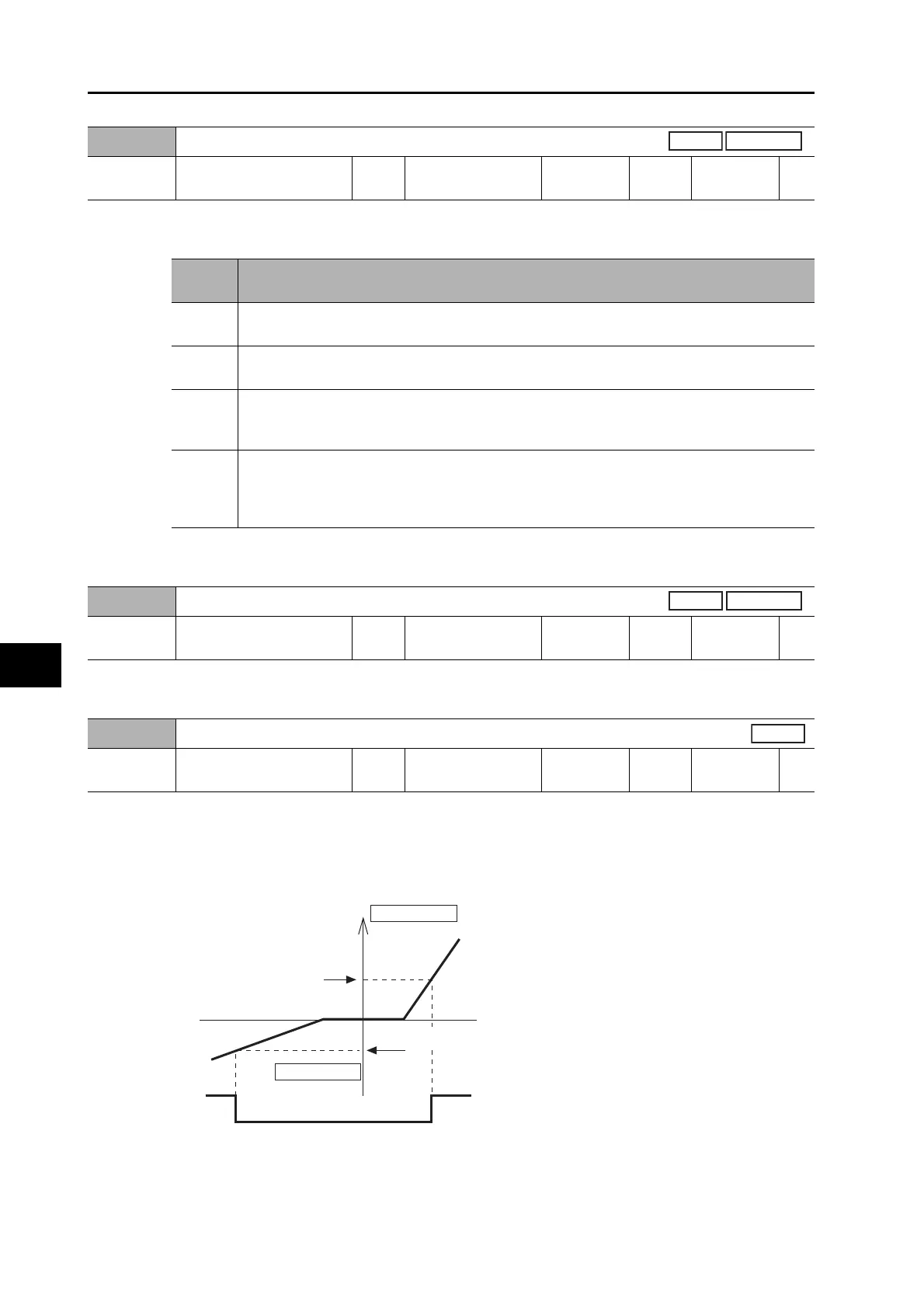
General-purpose output timing is set by rotation speed r/min.
General-purpose output 1 (ZSP) will be turned ON when the speed of the motor is lower than the
setting of this parameter.
The set value in this parameter is valid in both forward and reverse directions, regardless of the
actual motor rotation direction. The setting has a hysteresis of 10 r/min.
Pn432
Positioning Completion Condition Selection
Setting
range
0 to 3 Unit −
Default
setting
0
Power OFF
and ON
−
Position
Set
value
Description
0
Positioning completion output (INP1) turns ON when the position error is within the
Positioning Completion Range 1 (Pn431).
1
Positioning completion output turns ON when the position error is within the Positioning
Completion Range 1 (Pn431) and there is no position command.
2
Positioning completion output (INP1) turns ON when the zero speed detection output (ZSP)
is ON, the position error is within the Positioning Completion Range 1 (Pn431), and there is
no position command.
3
Positioning completion output turns ON when the position error is within the Positioning
Completion Range 1 (Pn431) and there is no position command. The ON status is then held
until the Positioning Completion Hold Time (Pn433) elapses. After that, if turns ON or OFF
based on the position error at the time.
Pn433
Positioning Completion Hold Time
Setting
range
0 to 30,000 Unit 1 ms
Default
setting
0
Power OFF
and ON
−
Pn434
Zero Speed Detection
Setting
range
10 to 20,000 Unit r/min
Default
setting
50
Power OFF
and ON
−
All
Speed
Reverse operation
OUTM1
ON
(Pn434+10)r/min
Forward operation
(Pn434−10)r/min
 Loading...
Loading...






