Parameter Details
12
12.4 d: REFERENCE
SIEPYEUOQ2A01A AC Drive Q2A Technical Manual 601
When the frequency reference or PID output value is 0% to 50%, the drive reverses the motor in the set direction.
When the frequency reference or PID output value is 50% to 100%, the drive operates the motor in the set
direction.
Note:
When you use the Bi-Directional function with PID control, you can use an MFDI terminal set for PID BiDir [H1-xx = 7A] to enable/
disable the Bi-Directional function.
Table 12.24 shows how the drive operates when you use the PID control function with the Bi-Directional function
and d4-11 = 1:
Table 12.24 Bi-Directional Function Operation Conditions
b5-01 [PID Enable] Setting
Status of MFDI Terminal Set for 7F [PID Bi-Directional Enable]
ON OFF
b5-01 = 0 [Disabled] Bi-Directional function enabled Bi-Directional function enabled
b5-01 ≠ 0 [Enabled] Bi-Directional function enabled Normal operation (Bi-Directional function disables)
• When PID Control is Disabled or H1-xx = 6A [DI Function Select = PID Disable] is Activated
When the frequency reference is 0% to 50%, the drive reverses the motor in the set direction. When the
frequency reference is 50% to 100%, the drive operates the motor in the set direction. Figure 12.62 shows the
frequency reference change at this time. This is an example of operation when the Forward Run command is
input.
Figure 12.62 Frequency Reference Transition when PID Control is Disabled or PID Disable is ON
Note:
When b1-04 = 1 [Reverse Operation Selection = Disabled], the drive will not run in Reverse. The frequency reference limit is 0 Hz.
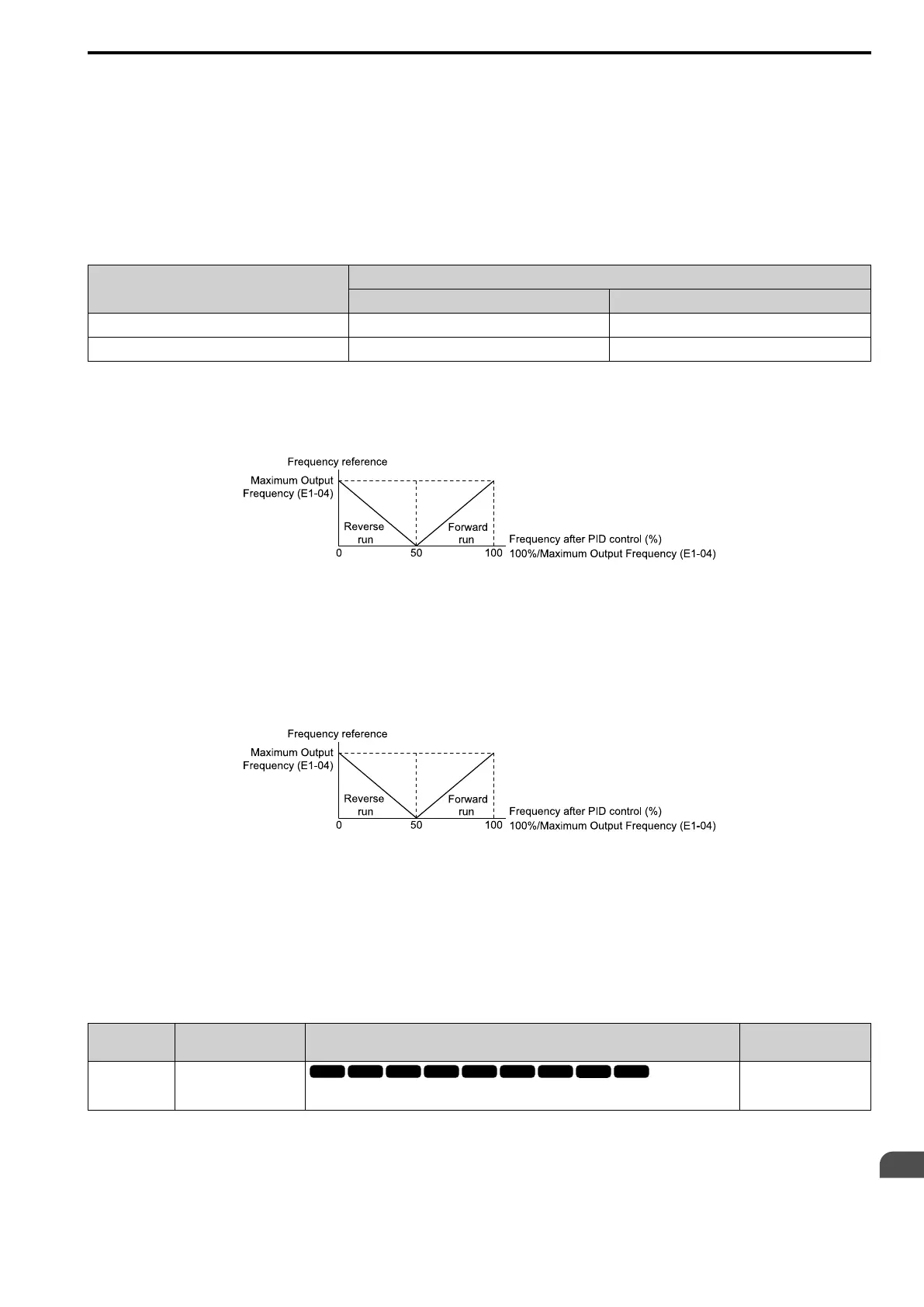
• When PID Control is Enabled and H1-xx = 7A [PID BiDir] is Activated
The Bi-Directional function is enabled. When the frequency reference is 0% to 50% after PID control execution,
the drive runs the motor opposite of the set direction. When the frequency reference is 50% to 100%, the drive
runs the motor in the set direction. Figure 12.63 shows the frequency reference change at this time. This is an
example of the operation when the Forward Run command is input.
Figure 12.63 Frequency Reference Transition when PID Control and PID Bi-Directional are Enabled
Note:
When b1-04 = 1, the drive will not run the motor in Reverse. The frequency reference limit is 0 Hz.
• When PID Control is Enabled and H1-xx = 7A is Deactivated
The Bi-Directional function is disabled. When the frequency reference is a negative value after PID control
execution, the drive runs the motor opposite of the set direction. The frequency reference value is an absolute
value.
■ d4-12 Stop Position Gain
No.
(Hex.)
Name Description
Default
(Range)
d4-12
(02B8)
Stop Position Gain
Sets the gain to adjust the stopping accuracy. Set this parameter when b1-03 = 9 [Stopping
Method Selection = Distance Stop].
1.00
(0.50 - 2.55)
If the motor stops before the necessary stop position, increase the setting value. If the length of time for the motor
to stop is too long, decrease the setting value.

 Loading...
Loading...




