12.4 d: REFERENCE
604 SIEPYEUOQ2A01A AC Drive Q2A Technical Manual
■ Speed Limit and Speed Limit Bias
The drive reads the speed limit setting from the input selected in d5-03 [Speed Limit Selection]. You can use d5-
05 [Speed Limit Bias] to add a bias to this speed. Parameter d5-08 [UniDir Speed Bias] sets how the drive applies
bias to the speed limit.
Table 12.27 shows the relation between these settings:
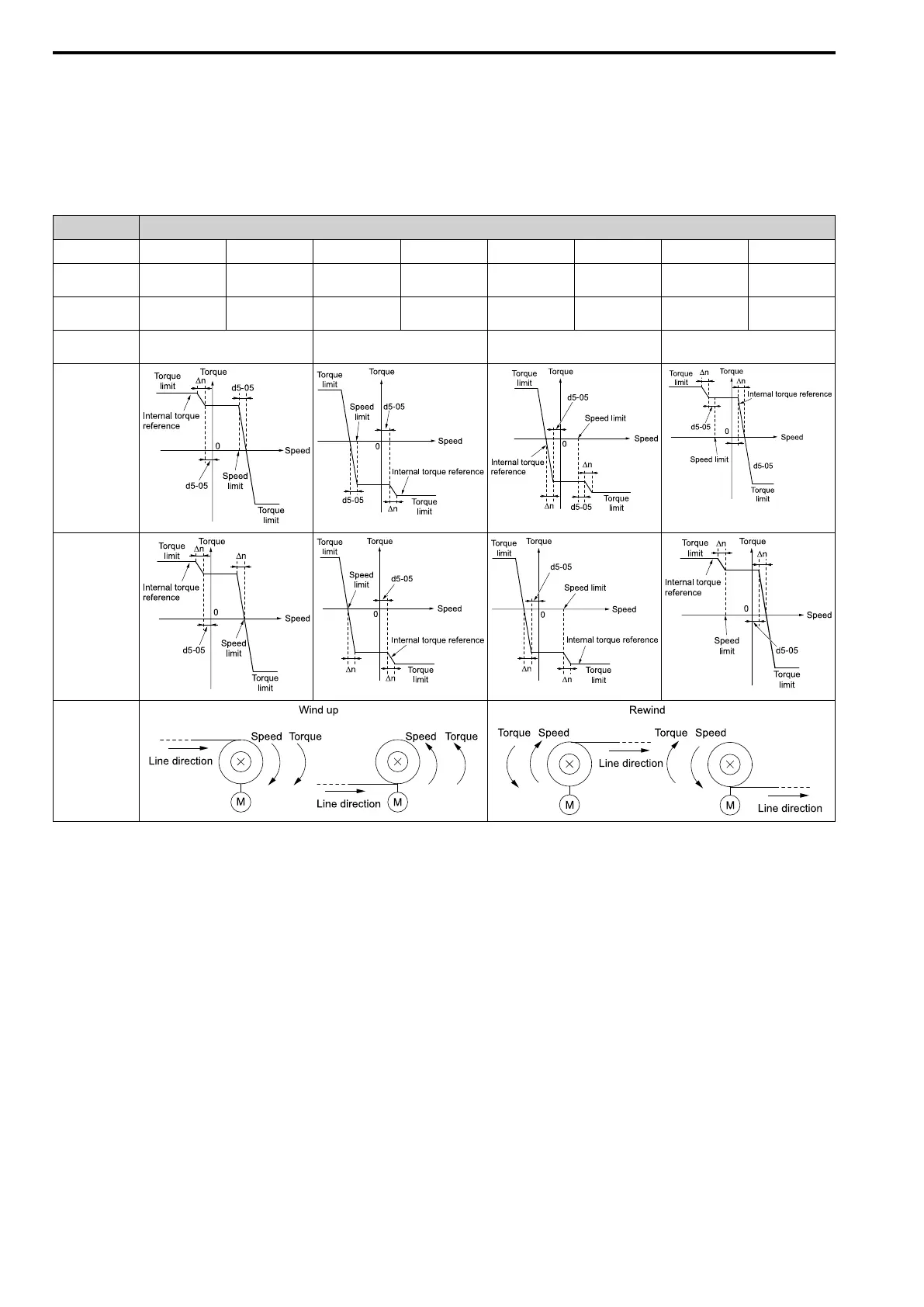
Table 12.27 Speed Limit, Speed Bias and Speed Limit Priority Selection
Operating Conditions
Run command Forward Reverse Forward Reverse Forward Reverse Forward Reverse
Torque reference
direction
+ (Positive) + (Positive) - (Negative) - (Negative) - (Negative) - (Negative) + (Positive) + (Positive)
Speed limit
direction
+ (Positive) - (Negative) - (Negative) + (Positive) + (Positive) - (Negative) - (Negative) + (Positive)
Direction of
motor rotation
Forward Reverse Forward Reverse
Generated torque
(d5-08 = 0
[Disabled])
*1
Generated torque
(d5-08 = 1
[Enabled])
*1
Application
example
*1 The C5 parameter set the Δn value.
■ Show Speed Limit Operation
When the motor is at the speed limit or more than the speed limit, the drive sends a signal to the PLC or other
such control devices to tell you that an error has occurred. To enable this function, set an DO function [H2-01 to
H2-03] to 31 [@SpdLim@Trq].
■ Switch Between Torque Control and Speed Control
Use a digital input to switch Torque Control and Speed Control. To enable this function, set H1-xx = 13 [DI
Function Select = Spd/Trq Switch] to enable this function.
When you switch from Speed Control to Torque Control, the torque limit becomes the torque reference and the
speed reference becomes the speed limit. When you switch from Torque Control to Speed Control, the torque
reference becomes the torque limit and the speed limit becomes the speed reference. When you must use a delay
time to switch between Speed Control and Torque Control, set d5-06 [Spd/Trq Chg Time]. During this switch
delay time, the drive keeps the reference value of the Torque Control and Speed Control when the switch signal
was input. Change the reference values from an external control device during this delay time.
 Loading...
Loading...





