Parameter Details
12
12.7 H: TERMINALS
SIEPYEUOQ2A01A AC Drive Q2A Technical Manual 677
Table 12.41 Stopping Methods for External Fault
Setting
Signal Input Method from
Peripheral Devices
*1
External Fault Detection Method
*2
Stopping Method
N.O. N.C.
Always
Detected
Detected
during RUN
Only
Ramp to Stop
(Fault)
Coast to Stop
(Fault)
Fast Stop
(Fault)
Continuous
Operation
(Alarm Only)
20 x - x - x - - -
21 - x x - x - - -
22 x - - x x - - -
23 - x - x x - - -
24 x - x - - x - -
25 - x x - - x - -
26 x - - x - x - -
27 - x - x - x - -
28 x - x - - - x -
29 - x x - - - x -
2A x - - x - - x -
2B - x - x - - x -
2C x - x - - - - x
2D - x x - - - - x
2E x - - x - - - x
2F - x - x - - - x
*1 Set the terminal to N.O. (detects external fault when switched ON) or N.C. (detects external fault when switched OFF).
*2 Set the drive to always detect each fault or to detect only during run.
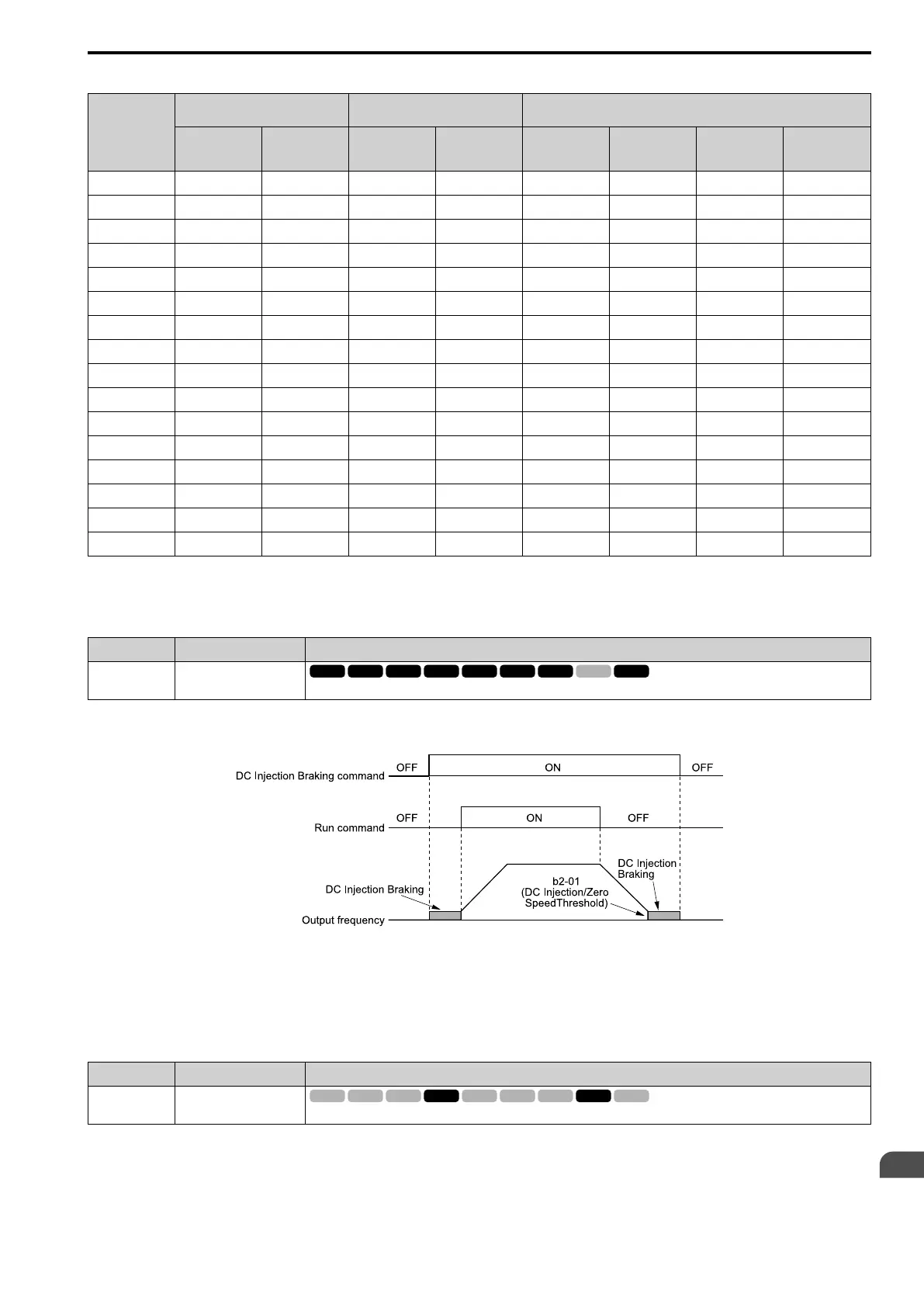
■ 30: DCInj Cmd
Setting Function Description
30 DCInj Cmd
Sets the command to use DC Injection Braking to stop the motor.
If you input the Run command or JOG command, it will cancel DC Injection Braking.
Figure 12.78 shows the DC Injection Braking function:
Figure 12.78 DC Injection Braking Time Chart
Note:
• When A1-02 = 8 [Control Method = EZ Vector], this function is available if you use a PM motor.
• Refer to “b2: DC INJ / SHORT CKT BRAKE” for more information.
■ 31: Zero Servo
Setting Function Description
31 Zero Servo
Sets the function to hold a stopped motor.
This function will hold a stopped motor if an external force is applied or an analog reference is offset.
 Loading...
Loading...





