3-37
CHAPTER 3 Installation
6-5 Gripping force of end effector
The gripping force of the end effector must have a sufcient extra margin of
strength versus the workpiece weight and reaction force applied to the work-
piece during robot operation.
The reaction force applied to the workpiece during operation can be calculated
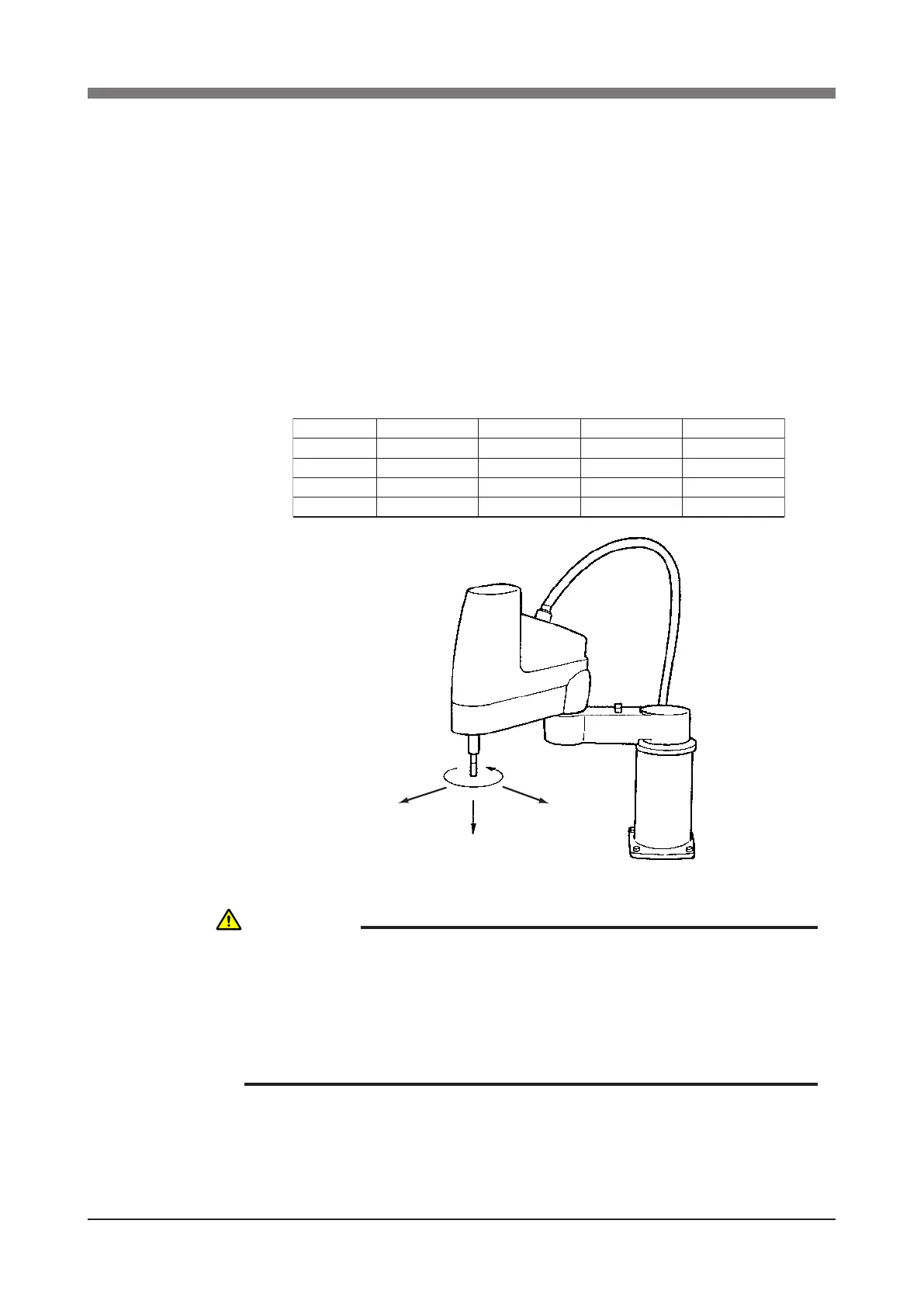
from the acceleration applied to the end effector attachment. The maximum ac-
celeration on the end effector attachment of each robot model is listed in the ta-
ble below. When the workpiece position is offset to the end effector attachment,
the accelerations Amax and A
XY
max become larger by an amount equal to the
offset versus the arm length. When the R-axis rotates during operation, this ac-
celeration A
R
max must be taken into account.
Table 3-3 Maximum acceleration during robot operation
Robot Model
R6YXH250
R6YXH350
R6YXH400
R6YXX1200
Amax(m/sec
2
) A
XY
max(m/sec
2
) Azmax(m/sec
2
) A
R
max(rad/sec
2
)
62 45 23 140
71 48 23 120
91 46 23 120
45 40
39
8
Fig. 3-42 Maximum acceleration on end effector attachment
WARNING
THE GRIPPING FORCE OF THE END EFFECTOR MUST HAVE A
SUFFICIENT EXTRA MARGIN OF STRENGTH TO PREVENT THE
WORKPIECE FROM COMING LOOSE AND FLYING OFF DURING ROBOT
OPERATION.
IF THE GRIPPING FORCE IS TOO WEAK, THE WORKPIECE MAY COME
LOOSE AND FLY OFF CAUSING ACCIDENTS OR INJURIES.
 Loading...
Loading...







