5-8
CHAPTER 5 Periodic Inspection
5 Replacing the Harmonic Drive
The X series robots listed in Table 5-1 use a harmonic drive as the speed reduc-
tion gear for the X, Y and R axes. Harmonic drives need to be replaced after a
specied operation time. Use the guideline explained below to determine the
replacement period and replace the harmonic drive periodically.
Since the X series robots listed in Table 5-1 use long-life harmonic grease, it is
not necessary to replace the harmonic grease.
5-1 Replacement period
The harmonic drive replacement period is determined by the total number of
turns of the wave generator used in the harmonic drive. It is recommended to
replace the harmonic drive when the total number of turns has reached 8.4×10
8
(at ambient operating temperatures of 0°C to +40°C). This means that the
replacement period will differ depending on the following operating conditions.
If the robot operation duty ratio is high or the robot is operated in environments
at higher temperatures, the harmonic drive should be replaced earlier.
Replacement period = 8.4×10
8
/(n×60×h×D×N×θ) years
where n : Number of axis movements per minute
θ : Average turn per axis movement
N : Speed reduction ratio
h : Operation time per day
D : Operation days per year
For example, when the robot is used under the following conditions, the replace-
ment period for the X-axis harmonic drive of the robot can be calculated as fol-
lows.
n : 10
θ : 0.25
N : 80
h : 24 hours per day
D : 240 days per year
Replacement period = 8.4×10
8
/(n×60×h×D×N×θ)
= 8.4×10
8
/(10×60×24×240×80×0.25)
= 12.2 years
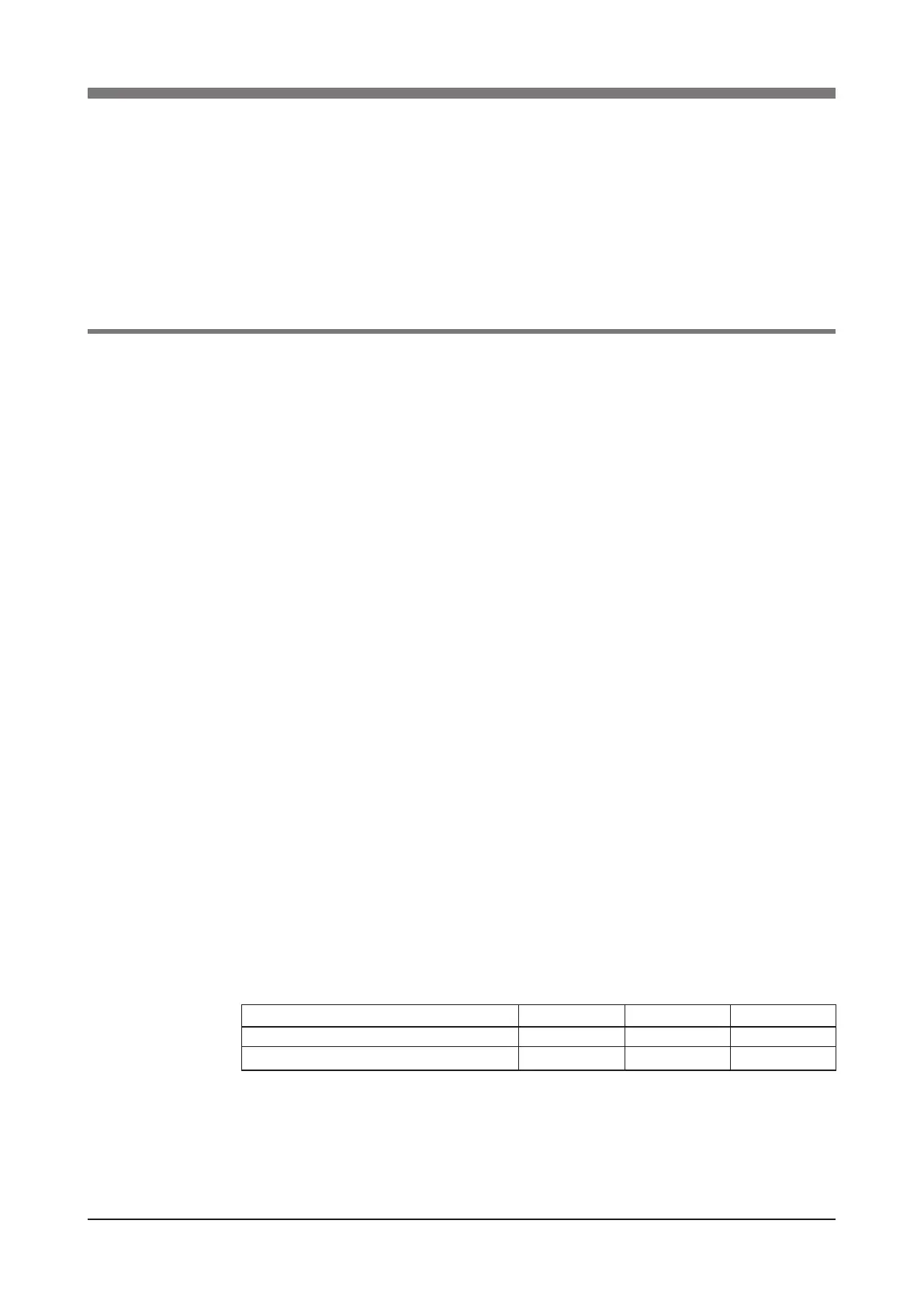
Table 5-1 Harmonic drive speed reduction ratio
Robot model
R6YXH250, R6YXH350, R6YXH400
R6YXX1200
50
–
50
–
50
50
X-axis
Y-axis
R-axis
 Loading...
Loading...







