5-31
5
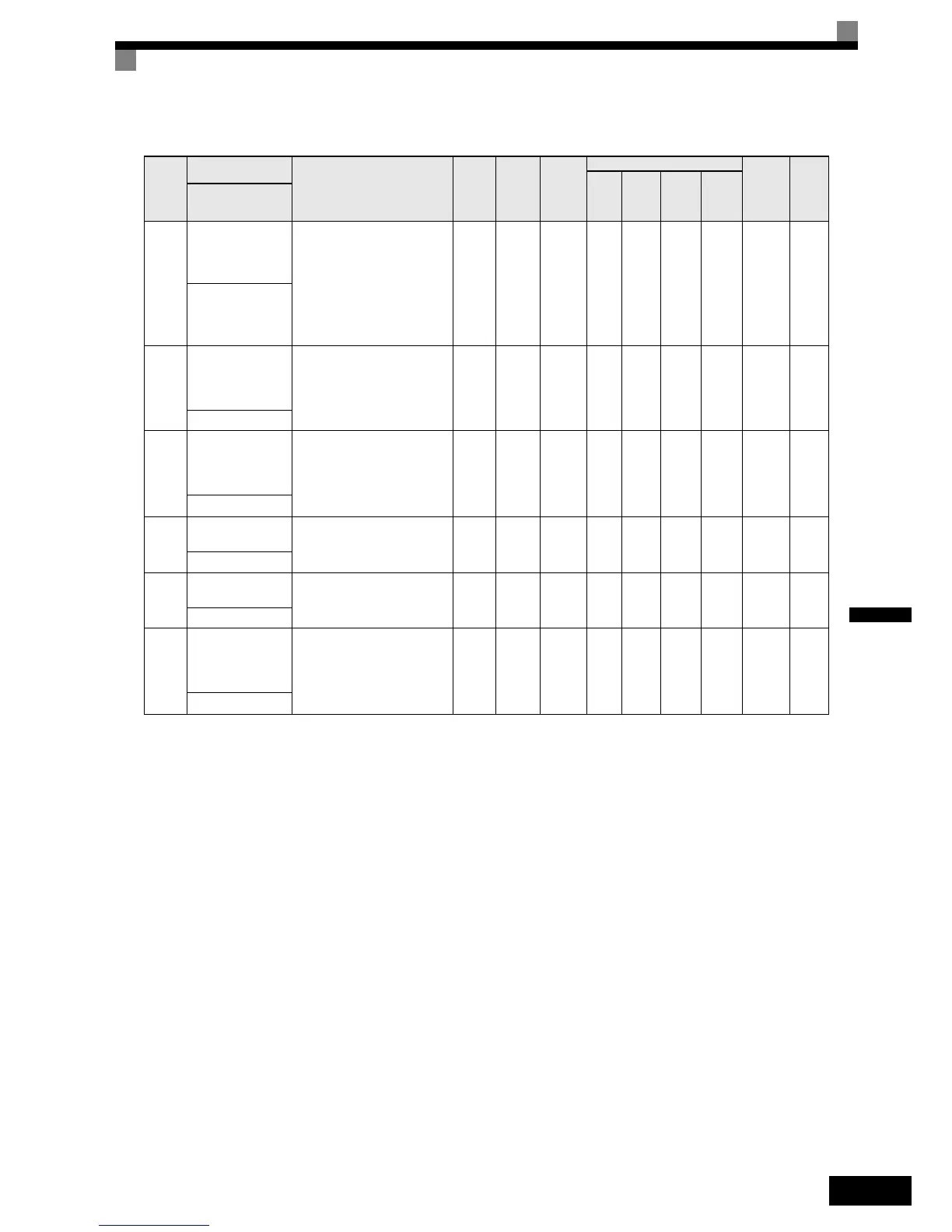
Serial Communications Settings: F6
Param-
eter
Num-
ber
Name
Description
Set-
ting
Range
Fac-
tory
Setting
Change
during
Opera-
tion
Control Methods
MEMO-
BUS
Register
Page
V/f
Open
Loop
Vector
Closed
Loop
Vector
Closed
Loop
Vector
(PM)
Display
F6-01
Operation selection
after communica-
tions error
Sets the stopping method for
communications errors.
0:Deceleration to stop using the
deceleration time in C1-02
1:Coast to stop
2:Emergency stop using the
deceleration time in C1-09
3:Continue operation
0 to 3 1 No A A A A 3A2H -
Comm Bus Fault
Sel
F6-02
Input level of exter-
nal error from Com-
munications Option
Card
0:Always detect
1:Detect during operation
0 or 1 0 No A A A A 3A3H -
EF0 Detection
F6-03
Stopping method
for external error
from Communica-
tions Option Card
0:Deceleration to stop using the
deceleration time in C1-02
1:Coast to stop
2:Emergency stop using the
deceleration time in C1-09
3:Continue operation
0 to 3 1 No A A A A 3A4H -
EF0 Fault Action
F6-04
Trace Sampling
Time
-
0 to
60000
0NoAAAA3A5H-
Trace Sample Tim
F6-05
Current monitor
unit selection
Sets the unit of current monitor
0:Ampere
1:100%/8192
0 or 1 0 No A A A A 3A6H -
Current Unit Sel
F6-06
Torque reference/
torque limit selec-
tion from communi-
cations option card
0:Torque reference/torque limit
by communications option
disabled.
1:Torque reference/torque limit
by communications option
enabled.
0 or 1 0 No - - A A 3A7H -
Torque Ref/Lmt Sel