6-15
6
Brake Sequence with Torque Compensation at Start
(Closed Loop Vector for IM and PM only)
Torque Compensation function
If a load measuring device is installed in the elevator, an analog input can be used to input a torque compensa-
tion value to the inverter. This function requires Closed Loop Vector control for IM or PM.
The input torque compensation value is latched when the direction command is given. At the start it is
increased from zero to the latched value using the torque increase time set in parameter S1-22. The torque
compensation value fades out to 0 using the time constant S1-30 after the speed has reached the torque com-
pensation fade out level.
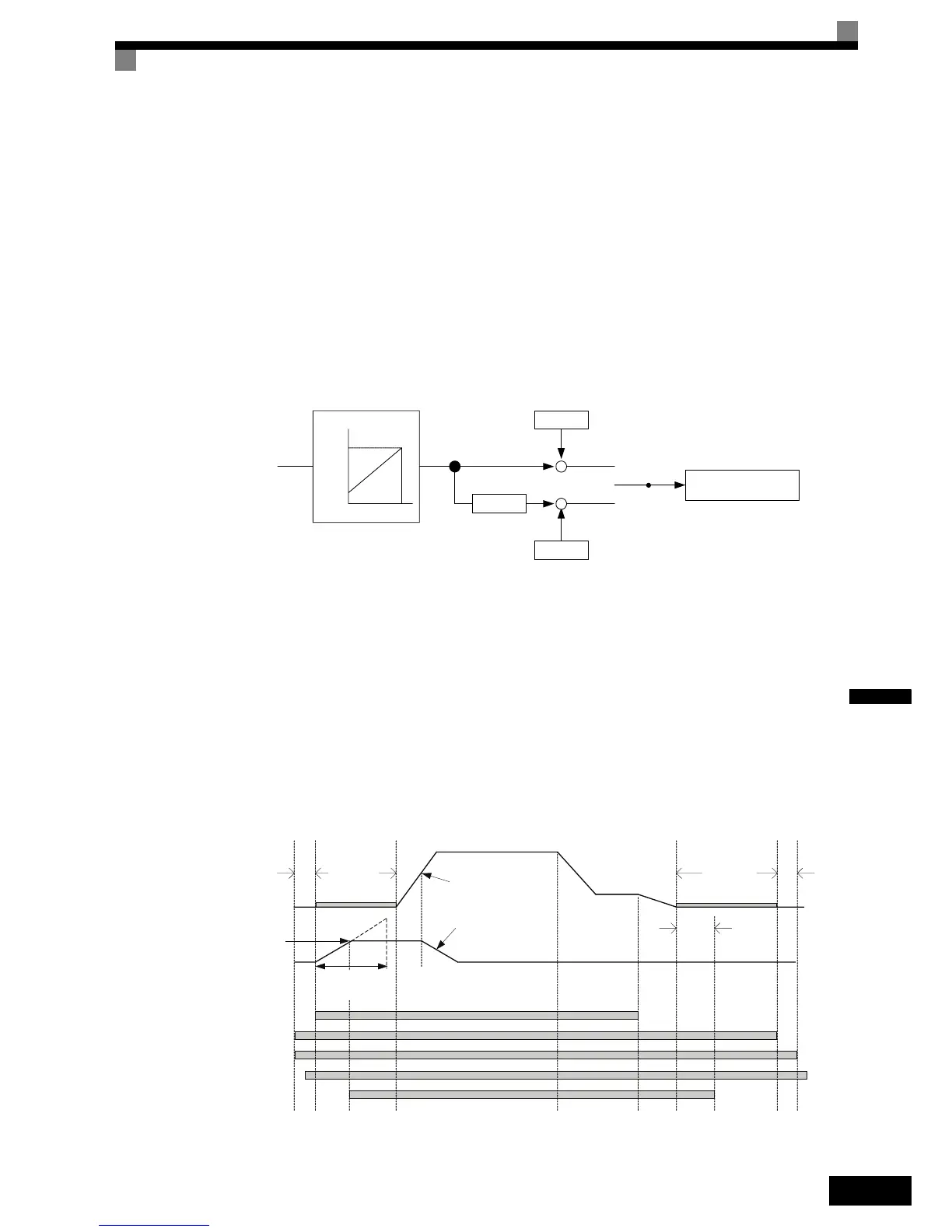
The torque compensation function can be adjusted using the parameters shown in the block diagram below.
Adjust the parameter so that the torque compensation value is zero when the elevator is balanced.
The torque compensation input source can be selected as follows:
• the analog input A1 can be used, if b1-01 is not set to 1 (speed reference source is not the A1 input) and the
A1 function is selected for torque compensation (H3-15=1)
• the channel Ch1 of an AI-14B option card can be used, if b1-01 is not set to 1 (speed reference source is
not the A1 input) and the A1 function is selected for torque compensation (H3-15=1)
• one of the input channels Ch2 or Ch3 of an AI-14B option card can be used when the input function for is
set to “Torque Compensation” (H3-05 or H3-09=14). The setting of b1-01 has no influence here.
Brake Sequence
The figure below shows the timing chart for this brake sequence.
Fig 6.3 Timing chart of Brake sequence with torque compensation at start
H3-16
H3-17
0 10v
terminal A1
H3-15=1
torque
compensation
S1-25
S1-23
S1-24
++
+
+
UP
direction
DOWN
direction
Torque compensation
%
Torque compensation
bias during raising
Torque compensation bias
during lowering
Torque compensation gain
during lowering
RUN
Inverter Hardware BB D/I
Contactor Control D/O
Contactor Confirmation D/I
Brake Open Command
t1 t2 t3 t4 t5 t6 t7 t8 t9
Torque comp
level at start
Speed
S1-04
Zero speed
control at start
S1-16
RUN delay time
300% Torque
Comp
Selected Speed
Torque compensation
fade out level S1-29
Torque compensation fade
out using S1-30 when S1-29
is reached
Leveling Speed
S1-05
Zero servo
control at stop
S1-07
Brake close
delay time
S1-19
Contactor open delay
Torque Comp
increase time
S1-22