6-80
6
Torque Limits during Rescue Operation
Depending on the rescue system it might be useful to apply a torque limit. The torque limit for rescue opera-
tion can be set in parameter S3-11. It is active only if the rescue operation digital input is set an has no effect to
the normal operation.
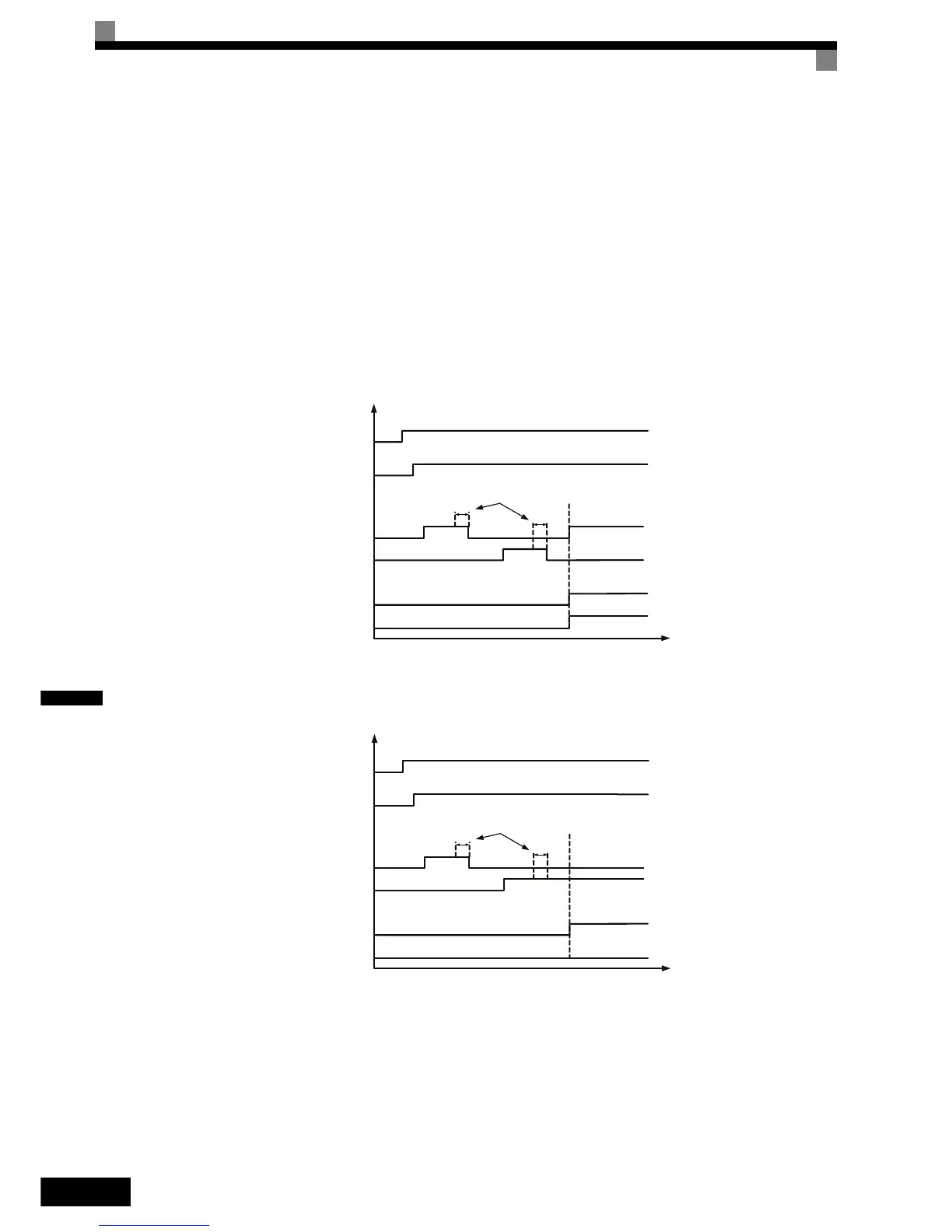
Light Load Direction Detection
If the light load detection function is enabled (S3-06 is set to 1), the inverter can detect the light load direction
for rescue operation. Therefore the elevator is driven with the light load detection speed (S3-10) sequentially
in forward and reverse direction for the time set in parameter S3-07. The current/torque is measured in each
direction and the values are compared to each other.
• If the detected light direction is forward, the inverter stops and restarts in the forward direction with the set
rescue operation speed. At the restart the light load detection status output (H2-=45) and the light load
direction output (H2-=44) are set.
Fig 6.25 Light Load Direction Sequence - FWD is Light Direction
•
If the detected light load direction is reverse, the inverter continues the operation with the set rescue oper-
ation speed. The light load detection status output (H1-=45) is set, the direction output is not changed.
Fig 6.26 Light Load Direction Sequence - REV is Light Direction
Light Load Direction Detection Method
If parameter S3-24 is set to “0”, the motor current values in Up and Down direction are compared. The direc-
tion with the lower current will be taken as light load direction.
If parameter S3-24 is set to “1”, in Open Loop Vector the motor speed values and V/f control the excitation
currents value in both directions are compared.
.
DI Rescue
operation
External
Controller Fwd
or Rev Run
Internal Fwd Run
Internal Rev Run
D/O Light Load Status
D/O Light Load Direction
OFF = Light load detection in progress
ON = Light load detection done
ON = Forward direction selected
Car evacuation in forward direction
REV
FWD
Torque is measured
after speed agree for
the time S3-07
.
DI Rescue
operation
External
Controller Fwd
or Rev Run
Internal Fwd Run
Internal Rev Run
D/O Light Load Status
D/O Light Load Direction
OFF = Light load detection in progress
ON = Light load detection done
OFF = Reverse direction selected
Car evacuation in reverse direction
REV
FWD
Torque is measured
after speed agree for
the time S3-07