57
[Setting]
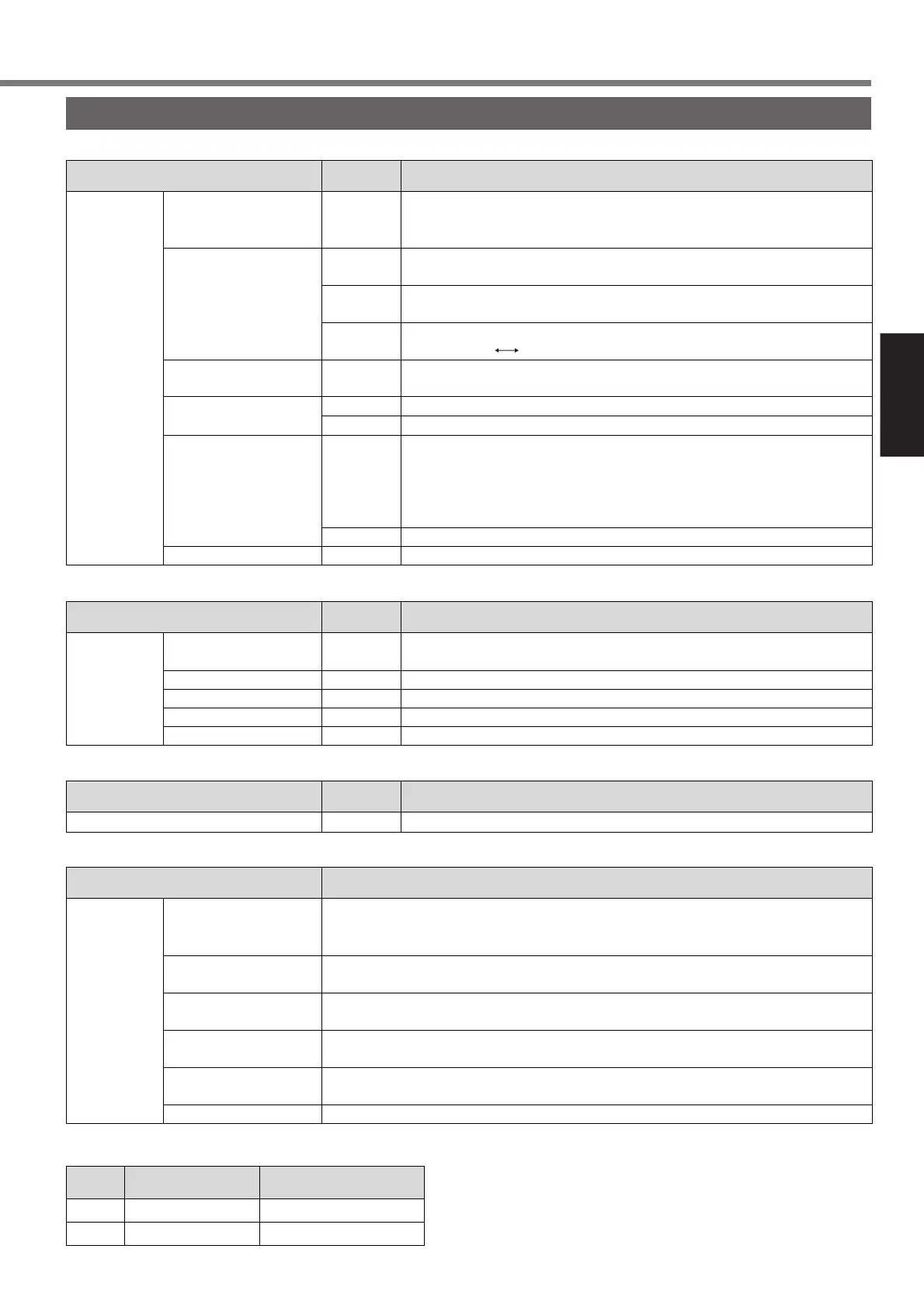
• Servo parameter
Group Outline
Servo
parameter No.
Function selection
Adjustment
Position Control
Input signals
Sequence
Full-Closed Control
Servo
parameter
01 to 03,
07,08,0B,
0C,0F
10 to 1E,
27 to 2E
20 to 26,
2F
30 to 35
44 to 46,
4C, 4D
53 to 5D
5E to 5F
60, 64, 65,
67 to 6E
70, 72, 73
78 to 7C
You can select a control mode,
and set up a baud rate.
You can set up servo gains (1st and 2nd) of position, velocity,
integration, etc, and time constants of various filters.
Parameters related to Real Time Auto-Gain Tuning. You
can set up a mode and select a mechanical stiffness.
You can set up parameters related to gain
switching(1st 2nd)
You can set up dividing of encoder output pulse.
You can set up the logic of input signals and the number of point input.
You can set up a torque limit of torque command.
You can set up detecting conditions of output signals, such as
positioning-completion.
You can also set up a deceleration/stop action at
main power-off, at alarm output and at servo-off,
and clear condition of the deviation counter.
You can set up actions of protective functions.
You can set up dividing of external scale.
Operation mode
Position/waiting time
Speed
Acceleration
Deceleration
Block
Step
parameter
Specifying the positioning procedure.
ABS (absolute position), INC (relative position),
Rotary (rotation coordinates), and Dwell time (standby time)
Inputting the coordinate data for positioning.
When dwell time is selected in operation mode, set the standby time.
Selecting a speed selection number in positioning.
Setting the speed by 16-bit positioning parameter.
Selecting an acceleration speed selecting number in positioning.
Setting the speed by 16-bit positioning parameter.
Selecting a deceleration speed selecting number in positioning.
Setting the speed by 16-bit positioning parameter.
Choosing either single operation or block operation.
32-bit positioning parameter 00 to 03 You can set data for offset or maximum movement.
Motor speed
Acceleration and
Deceleration
Homing
Jog operation
Others
16-bit
positioning
parameter
00 to 0F
10 to 1F
30 to 3B
40 to 45
48 to 54
You can set speed data of step operation.
You can set acceleration and deceleration data of step operation.
You can set data for homing.
You can set data for jog operation.
You can set data for teaching or operation direction and so on.
Group Outline
16-bit positioning
parameter No.
• 16-bit positioning parameter
Group Outline
32-bit positioning
parameter No.
• 32-bit positioning parameter
Group Outline
• Step parameter
• In this document, following symbols represent each mode.
P
F
Symbol
0
6
Position control
Full-Closed control
Control mode
Setup value of
servo parameter No.02
Composition of Parameters