228
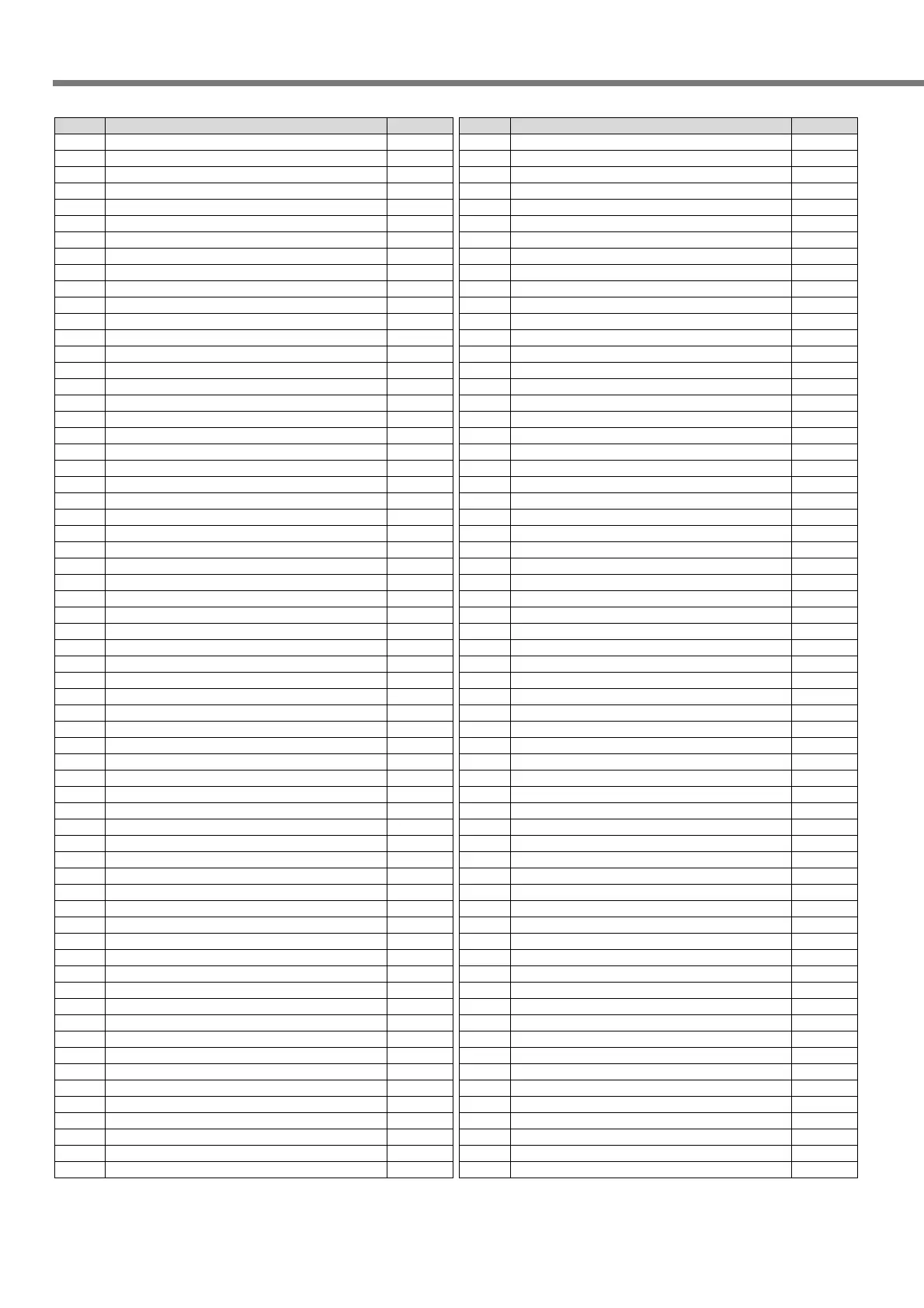
Default Parameters (for all the models of A4P Series)
SV.Pr**
00
01
02
03
04
05
06
07
08
09
0A
0B
0C
0D
0E
0F
10
11
12
13
14
15
16
17
18
19
1A
1B
1C
1D
1E
1F
20
21
22
23
24
25
26
27
28
29
2A
2B
2C
2D
2E
2F
30
31
32
33
34
35
36
37
38
39
3A
3B
3C
3D
3E
3F
Default
1
1
0
1
1
0
0
3
0
0
1
1
2
5
0
0
(63/32)
(35/18)
(16/31)
(0)
(65/126)
(300)
(50)
0
(73/38)
(35/18)
(1000)
(0)
(65/126)
1500
2
0
(250)
1
4/1
1
0
0
10
(0)
1500
2
0
0
0
0
0
0
(1)
(10)
(30)
(50)
(33)
(20)
(0)
0
0
0
0
0
0
300
0
0
Parameter
(For manufacturer's use)
7-segment LED status for console, initial condition display
Control mode
Torque limit selection
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Speed monitor (SP) selection
Torque monitor (IM) selection
(For manufacturer's use)
(For manufacturer's use)
Absolute encoder set up
Baud rate of RS232
(For manufacturer's use)
(For manufacturer's use)
Node address
1st position loop gain (*2)
1st velocity loop gain (*2)
1st velocity loop integration time constant (*2)
1st speed detection filter
1st torque filter time constant (*2)
Velocity feed forward
Feed forward filter time constant
(For manufacturer's use)
2nd position loop gain (*2)
2nd velocity loop gain (*2)
2nd velocity loop integration time constant
2nd speed detection filter
2nd torque filter time constant (*2)
1st notch frequency
1st notch width selection
(For manufacturer's use)
Inertia ratio
Real time auto tuning set up
Machine stiffness at auto tuning (*2)
Adaptive filter mode
Vibration suppression filter switching selection
Normal auto tuning motion setup
Software limit set up
Velocity observer
2nd notch frequency
2nd notch width selection
2nd notch depth selection
1st vibration suppression frequency
1st vibration suppression filter
2nd vibration suppression frequency
2nd vibration suppression filter
Adaptive filter frequency
2nd gain action set up
1st control switching mode
1st control switching delay time
1st control switching level
1st control switching hysteresis
Position loop gain switching time
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
SV.Pr**
40
41
42
43
44
45
46
47
48
49
4A
4B
4C
4D
4E
4F
50
51
52
53
54
55
56
57
58
59
5A
5B
5C
5D
5E
5F
60
61
62
63
64
65
66
67
68
69
6A
6B
6C
6D
6E
6F
70
71
72
73
74
75
76
77
78
79
7A
7B
7C
7D
7E
7F
Default
5
500
0
0
10000
10000
0
0
10000
0
0
10000
1
0
2
0
0
0
2
1
0
1
1
2
1
1
0
1
0
1
500
500
131
50
1000
0
0
1
0
0
0
0
0
0
0/3
35
0
0
25000
0
0
0
0
0
0
0
10000
0
10000
100
0
0
0
0
Parameter
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Numerator of output pulse ratio
Denominator of output pulse ratio
Pulse output logic inversion
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Smoothing filter
FIR filter set up
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Over-travel inhibit input valid
Over-travel inhibit input logic
Over-travel inhibit input operation setting
Home sensor input logic
Selecting the number of input points
Point specifying input logic setting
Multi-function input 1 Signal logic
Multi-function input 1 Signal selection
Multi-function input 2 Signal logic
Multi-function input 2 Selection logic
Servo-ON input valid
1st torque limit
(*1)
2nd torque limit
(*1)
In-position range
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Output signal selection
Undervoltage error response at main power-off
(For manufacturer's use)
Error response at main power-off
Error response action
Sequence at Servo-OFF
Mechanical brake delay at motor standstill
Mechanical brake delay at motor in motion
External regenerative resistor set up
(*2)
Main power-off detection time
Emergency stop torque set up
(For manufacturer's use)
Position deviation error level
(For manufacturer's use)
Overload level
Overspeed level
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
Numerator of external scale ratio
Multiplier of numerator of external scale ratio
Denominator of external scale ratio
Hybrid deviation error level
External scale direction
(For manufacturer's use)
(For manufacturer's use)
(For manufacturer's use)
• Servo parameter (SV.Pr)
*1) A maximum value of SV.Pr5E (torque limit setting) varies depending on an applicable motor. Refer to page 78.
*2) Default parameters of SV.Pr10 to 12, 14, 18, 19, 1C, 22 and 6C vary depending on a driver.
*3) The parameters with parenthesized set value are specified automatically when real-time auto-gain tuning or normal-mode
auto-gain tuning has been executed.