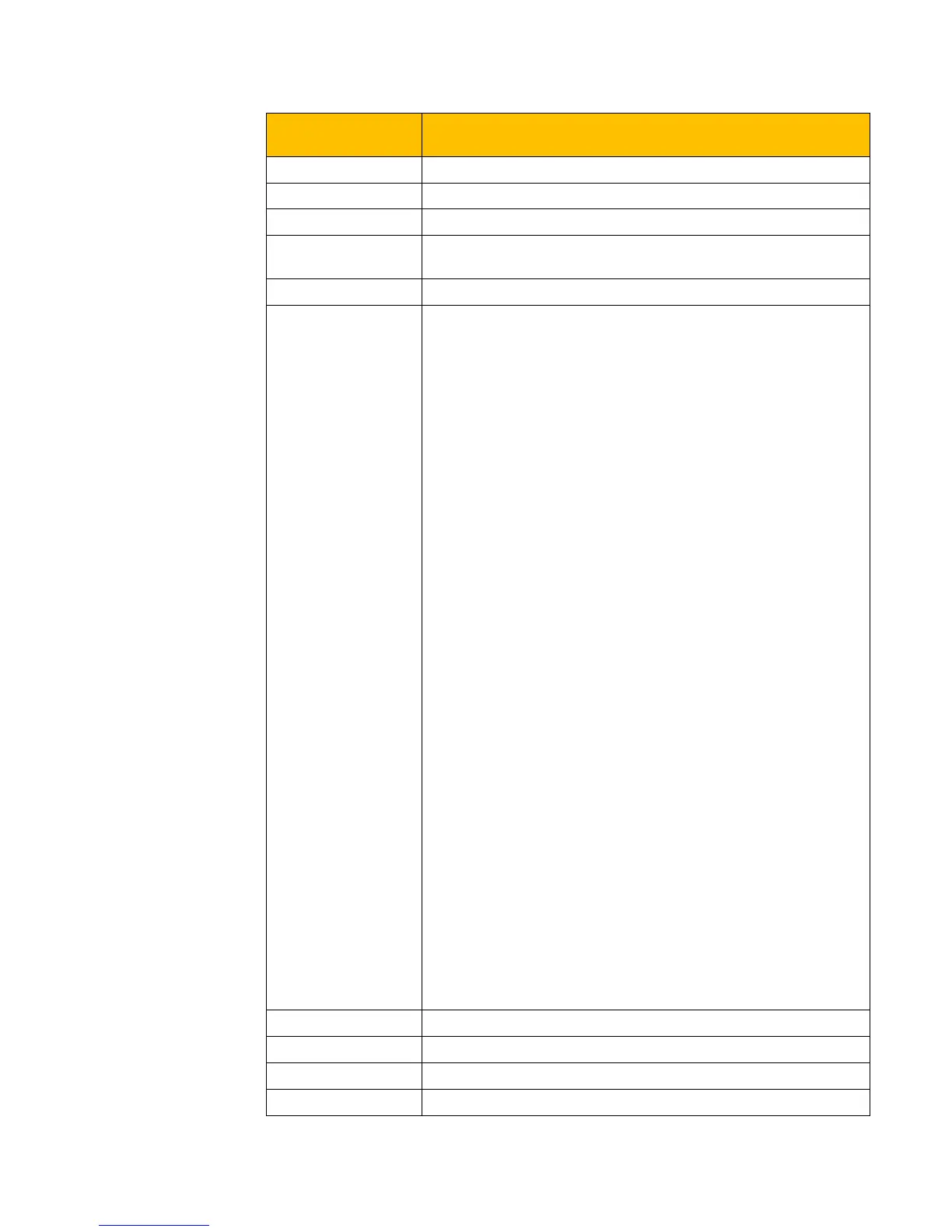
1000 Output frequency
1001 Output voltage
1002 Output current
1003 Pole numbers/ control mode, high-order byte is pole numbers,
low-order byte is control mode.
1004 Bus voltage
1005
----AC10 IP66
Drive ratio/inverter status
High-order byte is drive ratio, low-order byte is inverter status
Inverter status:
0X00: Standby mode
0X01: Forward running
0X02: Reverse running
0X04: Over-current (OC)
0X05: DC over-current (OE)
0X06: Input Phase loss (PF1)
0X07: Frequency Over-load (OL1)
0X08: Under-voltage (LU)
0X09: Overheat (OH)
0X0A: Motor overload (OL2)
0X0B: Interference (Err)
0X0C: LL
0X0D: External Malfunction (ESP)
0X0E: Err1
0X0F: Err2
0X10: Err3
0X11: Err4
0X12: OC1
0X13:PF0
0X14: Analog disconnected protection (AErr)
0X15: EP3
0X16: Under-load protection (EP)
0X17: PP
0X18: Pressure control protection (nP)
0X19: PID parameters are set incorrectly (Err5)
0X22: PMSM distuing fault (PCE)
0X2D: Communication timeout (CE)
0X2E: Flycatching fault (FL)
0X33: Watchdog fault (Err6)
0X34: STO fault
1006 The percent of output torque
1007 Inverter radiator temperature
1008 PID given value
1009 PID feedback value

 Loading...
Loading...









