Configuration
Machine zero mode
85
Unit
hardware
Connector
assignment / cable
Technical dataConfigurationPositioning and
control functions
Optimization
functions
InterfacesAccessories /
options
StatusParameterError list
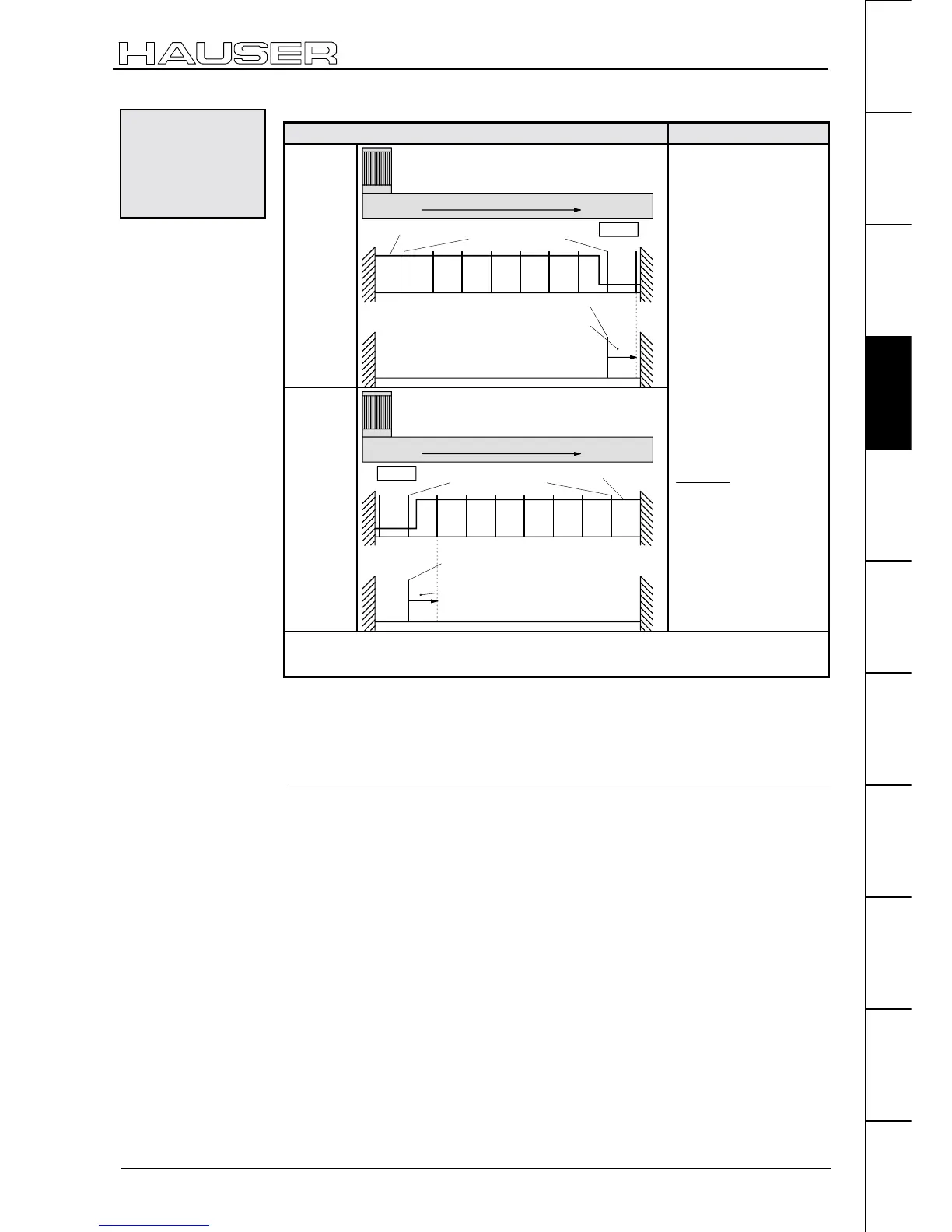
P212="4" (only permitted for COMPAX XX00 and COMPAX XX30!)
Find machine zero. Application
P213="0"
clockwising rotating motor
encoder zero pulse
MN-Ini
P29 = 0°- 360°
position of the actual MZ
signal MZ-ini.
0° 360°
Linear and rotatory
movements.
If you have an encoder
on the load, with this
setting you obtain a
reproducible machine
zero response to any
transmission factor
which does not round
to whole digits (i.e. not
precisely displayable).
P213="1"
clockwise rotating motor
encoder zero pulse
MN-Ini
position of the actual MZ
P29 = 0°-360°
signal MZ-ini.
0° 360°
Example of an
transmission factor
that cannot be
displayed exactly:
teeth11
teeth17
Note!
If P75
≠
0 for this setting, external position localization is switched on.
♦
External encoder; read via an encoder input module (E2, E4)
♦
Encoder input parametrized by: P144="6"
Specify P98 (travel per encoder revolution), P214 (encoder direction) and P143
(encoder pulse number).
Machine zero
equals external
initiator &
external zero
pulse
Conditions for
this operating
mode:

 Loading...
Loading...









