2020-11
46
UC***-18GS series
Description of Sensor Parameters
Hysteresis Mode
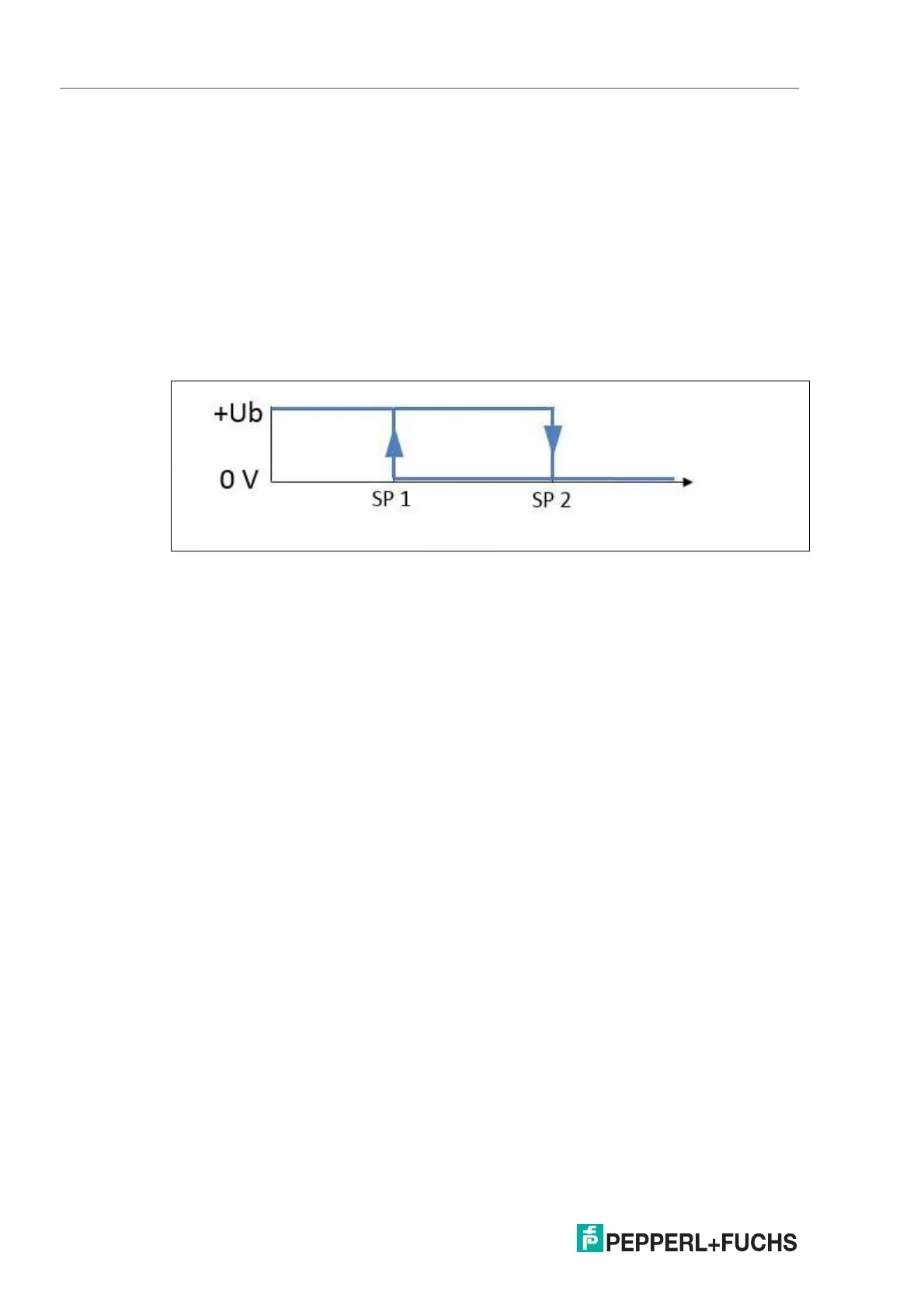
In "Hysteresis mode" output mode, the status of the switching output changes if an object is
approaching switch point 1. The status will change back to the previous value when the object
passes switch point 2.
Hysteresis Mode in Practice
A so-called two-point control can typically be implemented in practice. For example, to directly
control a pump which should always be filling a tank up to a specific level (>> switch point 1).
Only when a minimum fill level (>> switch point 2) is not reached is filling restarted.
This function also allows the sensor to directly reverse the situation. This means that in this
case, the pump empties the liquid in a tank to a specified minimum level when it has reached
maximum fill level. The emptying process should only be restarted if the maximum level is
reached again.
Figure 8.3 Example of behavior of a "normally-open" push-pull / PNP switching output in hysteresis
mode
Retroreflective Mode
In retroreflective mode, the ultrasonic sensor works in a similar way to an optical retroreflective
sensor. An ultrasonic sensor is programmed to recognize a reference object, e.g., the floor, a
conveyor belt or a side panel on a conveyor belt.
The switching output status changes if an object is detected in a shorter distance to the sensor
than the reference range set around the reflector.
When detecting an object at a greater distance than the reference range set around the reflec-
tor, the switching output changes status, like when an echo does not come back to the sensor.
This can happen in practice if an object placed in front of the reflector reflects the sound away
or absorbs the ultrasound due to its material composition.
Only switch point 1 is relevant in this output mode; any configured switch point 2 has no effect.
Retroreflective Mode in Practice
An example of how this output mode is applied in practice is to detect vehicles in parking
spaces. This involves ultrasonic sensors being mounted on the ceiling above the parking
space, using the parking lot floor as a reference reflector. This means vehicles in a parking
space can be reliably detected, even if its windshield is located below the sensor via which
sound is reflected away.
Retroreflective mode can also be used to detect objects on a conveyor belt. This involves the
sensor being mounted either alongside or above the conveyor belt, using the opposite side
panel or the conveyor belt itself as a reference reflector. The sensor reliably detects any objects
which pass it on the conveyor belt. This also happens even if the objects reflect sound away
due to an inclined surface or absorb the sound as a result of material composition (e.g., foam
components).