C-863.12 Mercury Controller MS249E Version: 1.2.1 69
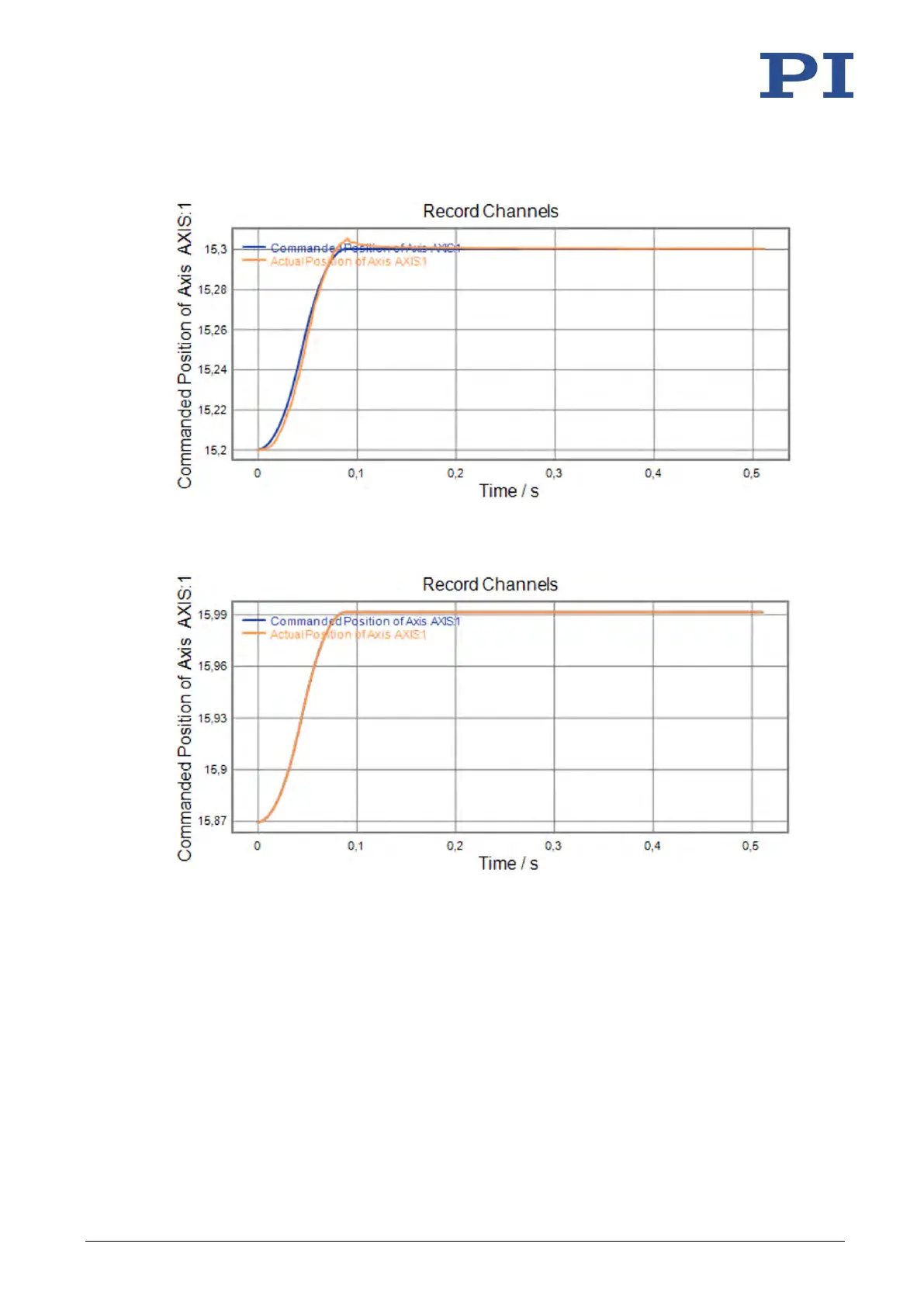
Figure 18: Strong overshooting
Figure 19: Optimal settling behavior (commanded and actual position congruent)
If the result is satisfactory (i.e., minimum overshoot, settling time not too long):
− You already have optimum parameter settings and do not have to do anything
further.
If the result is not satisfactory:
− Optimize the servo control parameters, see below.