234 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Appendix C Motor Control Feature Support
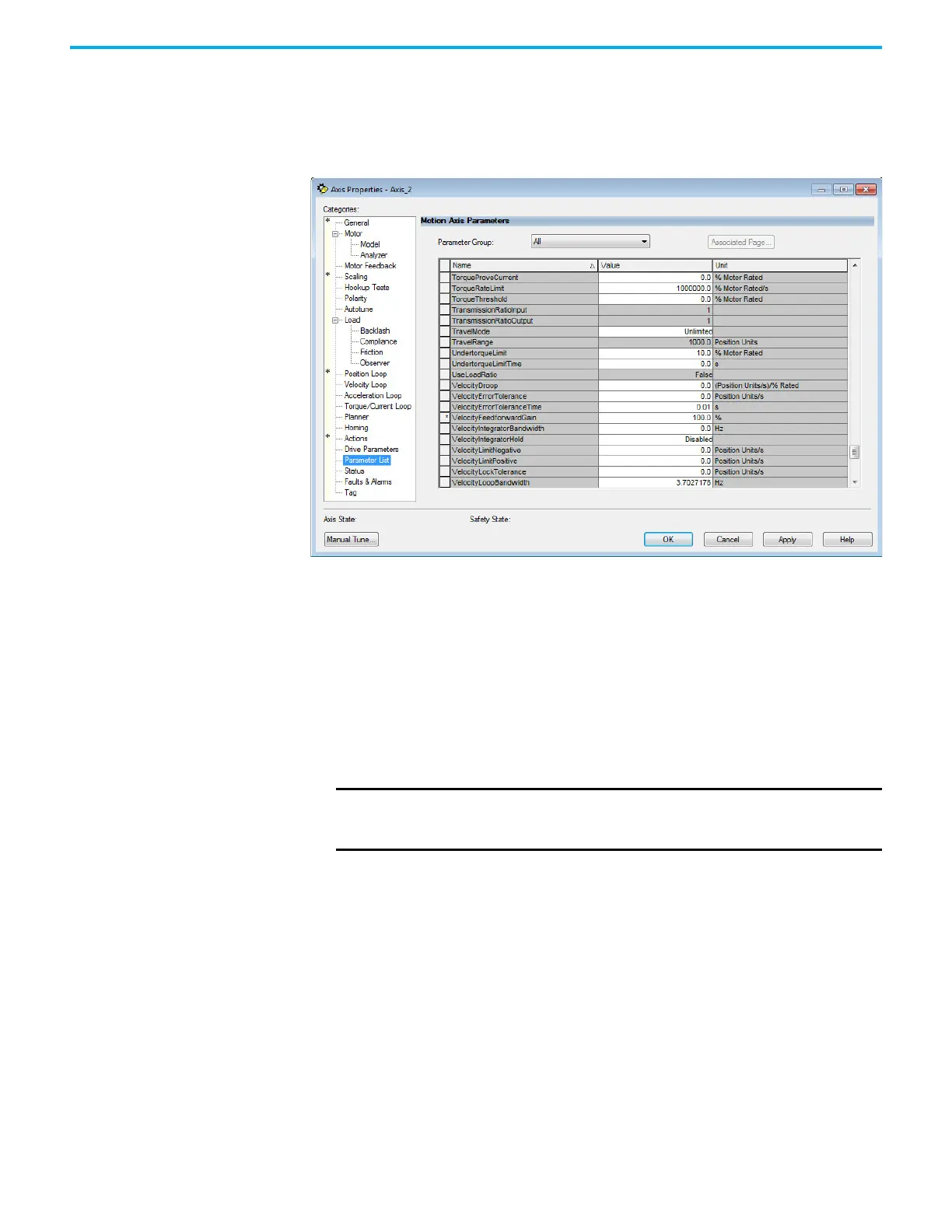
Velocity Droop Configuration
Follow these steps to configure the velocity droop attribute.
1. In the Controller Organizer, right-click an axis and choose Properties.
2. Select the Parameter List category and scroll to VelocityDroop.
3. Enter a value in the Velocity Droop attribute appropriate for your
application.
4. Click OK.
Commutation Self-sensing
Startup
The commutation self-sensing feature is used to determine the initial
electrical angle for permanent magnet (PM) motors with an incremental
encoder that do not have Hall effect sensors. For PM motors that use encoders
with Hall sensors, the drive can still be configured to use this feature, however,
the Hall effect signals are ignored. When enabled, this feature is executed
automatically at powerup and when the system is enabled.
The self-sense feature takes approximately 5 seconds to execute. Five seconds
is the default amount time assuming no retries are required. The axis stays in
the Starting state while self-sense executes. The sequencing of events is as
follows.
1. One-second current ramp time
2. One second delay
3. One-second move time
4. One second delay
5. One-second current ramp time
IMPORTANT Following a connection loss to the controller after the initial power-up,
the commutation self-sense feature is run again when connection is
re-established and motion is commanded.

 Loading...
Loading...











