126 Rockwell Automation Publication 20D-PM001D-EN-P - March 2019
Chapter 2 Programming and Parameters
1123 Home Position
User-defined Home position. After the Homing function is completed, the following parameters are updated
with the value of Par 1123: Par
744 [PositRef EGR Out], Par 747 [Position Cmmd], Par 763 [Position Actual] and
Par
765 [Posit Actl Load].
Note: This parameter was added for firmware version 3.001. This parameter was activated for firmware version
4.001.
Default:
Min/Max:
0
-/+ 2147483648
Y
RW 32-bit
Integer
1124 Home Actual Pos
Actual home position after the Homing function is complete. The value in this parameter displays the raw
position feedback data at home position.
Note: This parameter was added for firmware version 4.001.
Default:
Min/Max:
0
-/+ 2147483648
RO 32-bit
Integer
1125 DC Brake Level
Defines the DC brake current level injected into the motor when “DC Brake” is selected as a stop mode. This also
sets the braking current level when “Fast Stop” is selected.
The DC braking voltage used in this function is created by a PWM algorithm and may not generate the smooth
holding force needed for some applications. Refer to the PowerFlex 700S with Phase II Control Reference Manual,
publication PFLEX-RM003
.
Notes: This parameter was added for firmware version 3.001, but is not functional (for future use). The maximum
value was changed from 1170.0 to 3000.0 for firmware version 4.002.
Default:
Min/Max:
Units:
0.0
0.0/3000.0
V
Y
RW Real
1126 DC Brake Time
Sets the amount of time DC brake current is “injected” into the motor.
Note: This parameter was added for firmware version 3.001, but is not functional (for future use).
Default:
Min/Max:
Units:
0.0
0.0/655.0
s
Y
RW Real
1130 PPMP Pos Command
Sets the position reference for the Motion Planner. The units are counts.
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:
0
-/+ 2147483648
Y
RW 32-bit
Integer
1131 PPMP Pos Mul
Part of the input scale block. Set this value as the multiplier to the value of Par 1130 [PPMP Pos Command].
Also see Par
1132 [PPMP Pos Div]. The scale block is enabled by setting bit 4 of Par 1134 [PPMP Control].
The the intermediate product must be < 31 bits.
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:
1
1/2000000
Y
RW 32-bit
Integer
1132 PPMP Pos Div
Part of input scale block. Set this value as the divisor of the product of Par 1130 [PPMP Pos Command] and Par
1131 [PPMP Pos Mul]. Integer math applies. The scale block is enabled by setting bit 4 of Par 1134 [PPMP
Control].
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:
1
1/2000000
Y
RW 32-bit
Integer
1133 PPMP Scaled Cmd
Indicates the result of integer scaling of the position reference for the Motion planner or the Position loop. The
units are counts.
Note: This parameter was added for firmware version 3.001.
Default:
Min/Max:
0
-/+ 2147483648
RO 32-bit
Integer
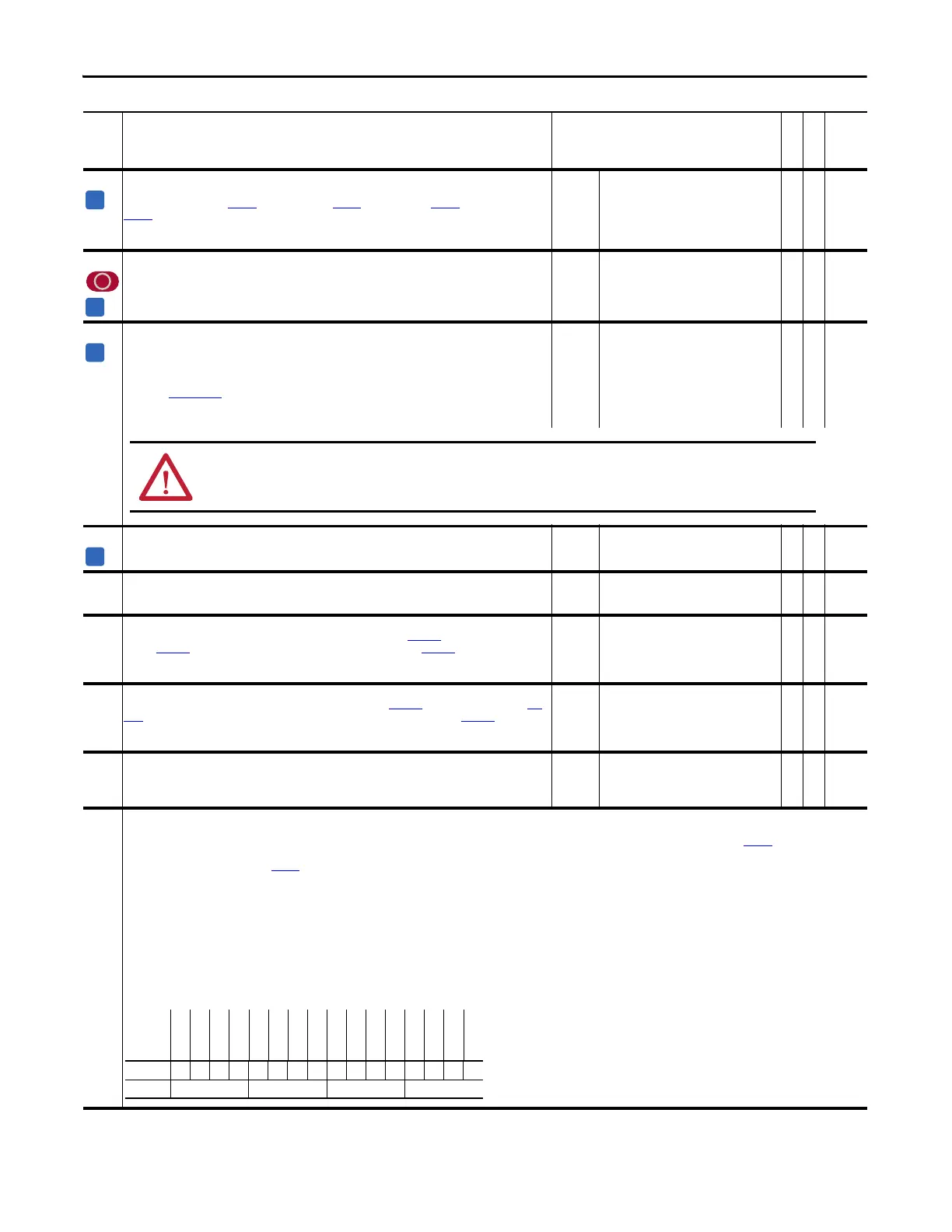
1134 PPMP Control
Establishes the operating condition for the Motion Planner. The operating mode(s) is selected if the corresponding bit is set.
Bit 0 “Absolute” Absolute mode. When using the Homing function while in Absolute mode, the value in Par 758 [Pt-Pt Posit Ref] must be set relative to the value in Par
763 [Position Actual] after
homing is complete. For example: When homing is complete Par 763 [Position Actual] = 1000 counts. If you want to move to an absolute position of 2000 counts relative to the home switch, you
must enter a value of 3000 counts into Par 758 [Pt-Pt Posit Ref] (i.e., 1000 + 2000 = 3000). If you want to move back to the home switch, using the same value in Par 763 [Position Actual] after
homing (1000), you must enter a value of 1000 into Par 758 [Pt-Pt Position Ref] (i.e., 0 + 1000 = 1000).
•Bit 1 “Incremental” Incremental mode
• Bit 2 “Start” Start
• Bit 4 “Scaling En” Scaling enabled
• Bit 5 “Over Ride En” Override enabled
• Bit 6 “S Curve En” S Curve Enabled
• Bit 7 “Cond Hold” Conditional Hold
• Bit 8 “Pause” Pause
•Bit 9 “Re-Synch” Re-Synch
Note: This parameter was added for firmware version 3.001.
No. Name
Description
Values
Linkable
Read-Write
Data Type
ATTENTION: If a hazard of injury due to movement of equipment or material exists, an auxiliary mechanical braking device
must be used. This feature should not be used with synchronous or permanent magnet motors. Motors may be
demagnetized during braking.
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Re-Synch
Pause
Cond Hold
S Curve En
Over Ride En
Scaling En
Reserved
Start
Incremental
Absolute
Default xxxxxx000000x000
Bit 1514131211109876543210
0 = False
1 = True
 Loading...
Loading...










