Rockwell Automation Publication 20D-PM001D-EN-P - March 2019 79
Programming and Parameters Chapter 2
417 Brake Watts
Sets the continuous rated power reference for the Dynamic Brake (DB). You may change the value of this
parameter only if you have selected and external DB resistor (set bit 1 “Brake Extern” of Par
414 [Brake/Bus
Cnfg].
Note: The maximum value was changed from 5000.0000 to 500000.0000 for firmware version 3.001.
Default:
Min/Max:
Units:
100.0000
0.0000/500000.0000
W
RW Real
418 Brake TP Sel
Enter or write a value to select the drive brake data displayed in Par 419 [Brake TP Data].
Default:
Options:
0 =
0 =
1 =
2 =
3 =
4 =
5 =
6 =
7 =
8 =
9 =
“Zero”
“Zero” 10 = “Data State”
“Duty Cycle” 11 = “MC BrakeEnbl”
“Power Actual” 12 = “1/rdb”
“Max BodyTemp” 13 = “1/th_eb”
“Max ElemTemp” 14 = “1/ce”
“BodyTemp Act” 15 = “tamax”
“ElemTemp Act” 16 = “1/th_ba”
“BTmpTripStat” 17 = “1/cb”
“ETmpTripStat” 18 = “DB IGBT Amp”
“Int DB Ohms”
419 Brake TP Data
Displays the data selected by Par 418 [Brake TP Sel].
Default:
Min/Max:
0.0000
-/+2200000000.0000
RO Real
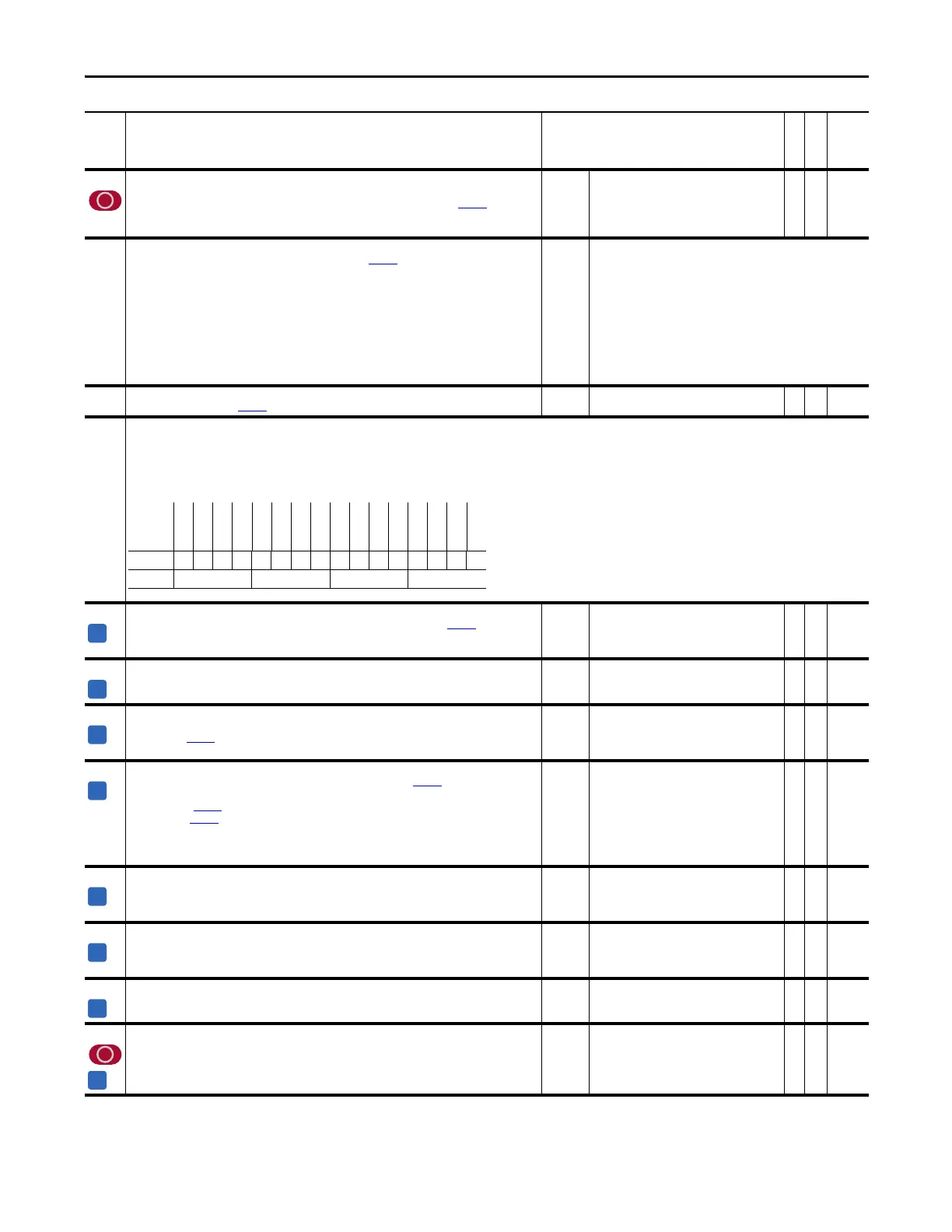
420 Pwr Strct Mode
Displays the power structure used in the drive. This is an identifier to the firmware for power structure control.
• Bit 0 “Lo Pwr Strct” = PowerFlex 700S Frame 1 to 6
• Bit 1 “Hi Pwr Strct” = PowerFlex 700S above Frame 6
• Bit 3 “Parallel Drv” = PowerFlex 700S Frame 12
Note: Bit 3 “Parallel Drv” was added for firmware version 3.001.
421 Iqs Integ Freq
Sets the break frequency of the torque producing (q-axis) current regulator. This and Par 422 [Iqs Reg P Gain]
determine the integral gain for the q-axis current regulator. Set by the autotune procedure. Do not change
this value.
Default:
Min/Max:
Units:
10
0/32767
rad/s
RW 16-bit
Integer
422 Iqs Reg P Gain
Sets the proportional gain of the torque producing (q-axis) current regulator. Set by the autotune procedure.
Do not change this value.
Default:
Min/Max:
Scale:
1.0
0.0/100.0
x 10
RW 16-bit
Integer
423 Iqs Rate Limit
Sets the limit of the rate of change for the torque producing (q-axis) current regulator. Do not change this
parameter. Use Par 355 [Iq Rate Limited] to control the q-axis current rate limit.
Default:
Min/Max:
Units:
Scale:
800.0
0.0/800.0
%/ms
x 10
RW 16-bit
Integer
424 Flux Ratio Ref
Active only in the Field Oriented Control (FOC) 2 motor control mode (when Par 485 [Motor Ctrl Mode] equals
1 - “FOC 2”). Provides a scaling factor for the flux producing (d-axis) current reference.
• When active (Par
511 [FVC2 Mode Config], bit 28 “FlxRatRef Use” is set), Flux Producing (d-axis) Current
Reference = Par 488 [Flux Current] x Par 424 [Flux Ratio Ref].
• When inactive (Par 511 [FVC2 Mode Config], bit 28 “FlxRatRef Use” is cleared) Flux Producing (d-axis)
Current Reference = Par 488 [Flux Current] below base speed and Flux Producing (d-axis) Current
Reference = Par 488 [Flux Current] x motor base speed/motor speed above base speed.
Default:
Min/Max:
Units:
Scale:
99.99
12.50/399.99
%
100 = 32767
RW 16-bit
Integer
425 Flux Rate Limit
Sets the limit for the maximum rate of change for flux producing (d-axis) current.
Default:
Min/Max:
Units:
Scale:
1.0
0.0/195.3
%/ms
x 10
RW 16-bit
Integer
426 Flux Satur Coef
This represents the amount of flux current required to compensate for the flux saturation effect of the motor.
Active only for FOC 2 motor control mode.
Default:
Min/Max:
Units:
Scale:
0.0
0.0/51.3
%
x 10
RW 16-bit
Integer
427 PM Mtr CEMF Comp
Provides CEMF compensation for the torque producing (q-axis) current in the permanent magnet motor
mode.
Default:
Min/Max:
Units:
0
0/100
%
RW 16-bit
Integer
428 IReg IGain Fctr
Adjustment for current regulator integral frequency factor (gain).
Default:
Min/Max:
1
1/20
RW 16-bit
Integer
No. Name
Description
Values
Linkable
Read-Write
Data Type
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Parallel Drv
PF 700L
Hi Pwr Strct
Lo PwrStrct
Default xxxxxxxxxxxx0000
Bit 1514131211109876543210
0 = False
1 = True
 Loading...
Loading...










