Rockwell Automation Publication 2198-RM006A-EN-P - December 2020 53
Appendix A Connectors and Field Connections
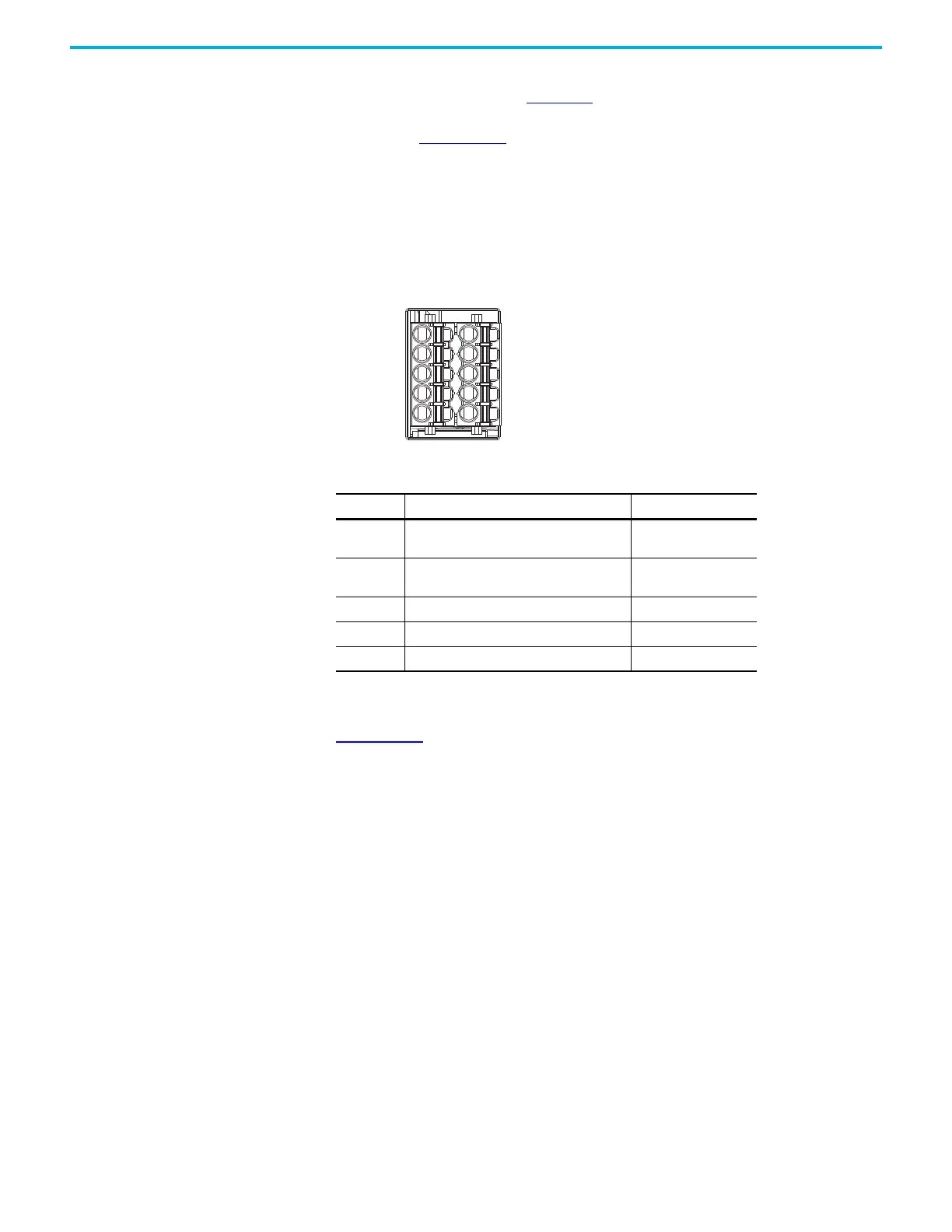
Safe Torque Off Connector
The Kinetix 5300 drives have a Safe Torque Off (STO) connector, where as the
Ultra3000 did not. Refer to Figure 20
for a the Kinetix 5300 connector, and see
the Kinetix 5300 Single-axis EtherNet/IP Servo Drives User Manual,
publication 2198-UM005
for information on STO with the Kinetix 5300 drive.
The Kinetix 5300 10-pin connector consists of two parallel 5-pin rows for
cascading safety connections from drive-to-drive when drives are joined by the
zero-stack feature.
Figure 20 - Kinetix 5300 STO Connector Assignment
The Safe Torque Off feature can be bypassed if necessary or applicable. Refer to
Kinetix 5300 Single-axis EtherNet/IP Servo Drives User Manual, publication
2198-UM005
for information.
Table 40 - Kinetix 5300 STO Connector Assignment
STO Pins Description Signal
1 and 6 Safety bypass plus signal. Connect to both
safety inputs to disable the STO function
SB+
2 and 7 Safety bypass minus signal. Connect to
safety common to disable the STO function
SB-
3 and 8 STO input 1 (SS_IN_CH0) S1
4 and 9 STO input common (SCOM) SC
5 and 10 STO input 2 (SS_IN_CH1) S2
Kinetix 5300 Drive
STO Connector
 Loading...
Loading...











