The operator may also program P057 = 100%, so that the hyperbolic step ends with P010 max. speed.
When the current limit is defined by overlapping two of the modes above or all the modes above, then the
current limit enabled time after time will be the lower one among the limits relating to each of the modes
applied.
The hyperbolic relation of the current limit with respect to speed is generally used if the motor
manufacturer imposes that when the speed of rotation increases, the max. current to be supplied to the
motor is to increase with a similar law, so as to avoid any switching trouble in the collector.
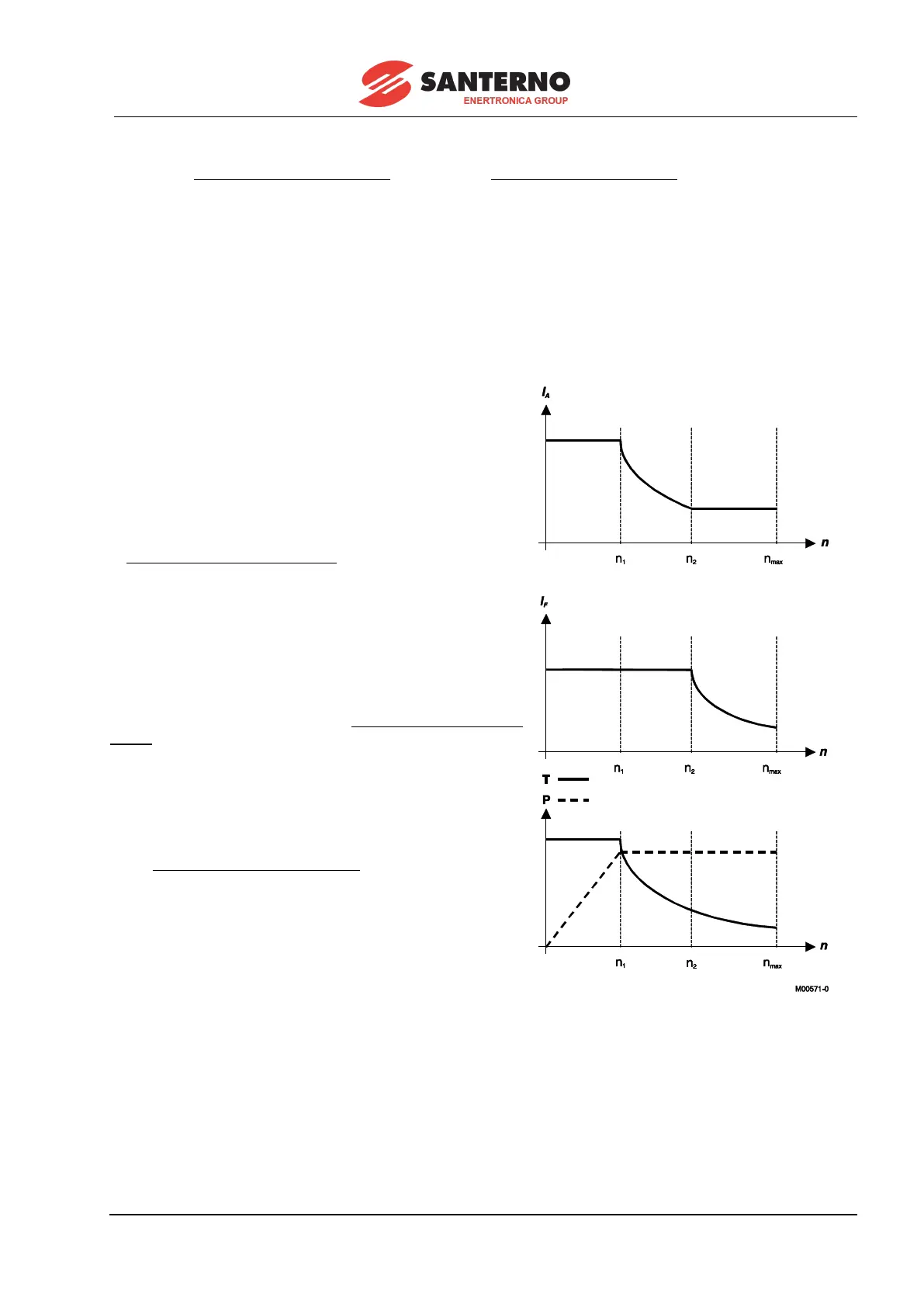
Another typical application example of the hyperbolic limit is
the mixed control of the armature limit current shown in
the figures.
The three figures show – depending on speed n – the
trends of armature max. current I
A
, field current I
F
, max.
torque T and max. power P.
In the first range 0 < n < n
1
, the motor is in full field and the
armature max. current is kept constant, so the operation is
in constant max. available torque mode. The max. allowable
power (as the product of armature voltage by armature
current), increases proportionally and attains its max. level
at speed n
1
.
In the second range n
1
< n < n
2
, the motor is in full field but
the armature max. current decreases hyperbolically, thus
leading the max. torque to decrease with speed. The max.
available power (as a product of torque by speed) is kept
constant, so the operation is in constant max. available
power mode.
In the third range n
2
< n < n
max
, the armature current is kept
constant but the motor is in field weaking mode, so the max.
torque goes on inversely decreasing with respect to speed.
The max. available power (as a product of torque by speed,
or of voltage by current) is kept constant, so the operation is
still in constant max. available power mode.
The current limit value, set at each speed value as we
discussed above, may be increased (overlimit) by the rate
programmed in parameter P060 and P061, for bridge A and
bridge B respectively. Such limit current increase is
permanent, but if a given max. allowable duty-cycle is not
respected for the current required (150% of the rated
current for 1min every 10min), alarm A022 (Drive It Trip) trips.
Finally, the current limit value, set at each speed value as we discussed above, may be decreased using
an external command by enabling a digital input programmed for function 4:Clim. The current limit value
enabled is decreased by the rate programmed in parameter P058.
The value of the current limit, besides being decreased by a set rate, may also be continuously
decreased through one of the configurable analog inputs by setting parameters C120(121)(122) at one of
values 8:Ext.curr.lim. ... 10:BrdgB ext.lim.
 Loading...
Loading...